- Тела примитивы. Матрица смежности

Содержание
- 2. Булевы операции Формообразование составных геометрических тел из тел примитивов, осуществляется с использованием булевых операций: Объединение -
- 3. Распознавание начинают с выявления базового тела. В данном примере это тело - цилиндр 1. После этого
- 4. Матрица смежности Для полного, непротиворечивого и независимого задания геометрической модели составного тела необходимо использовать матрицу смежности.
- 5. Порядок заполнения Построение и заполнение матрицы смежности осуществляется в порядке формообразования составного геометрического тела в следующей
- 6. 1. Указание порядкового номера составляющих тел примитивов
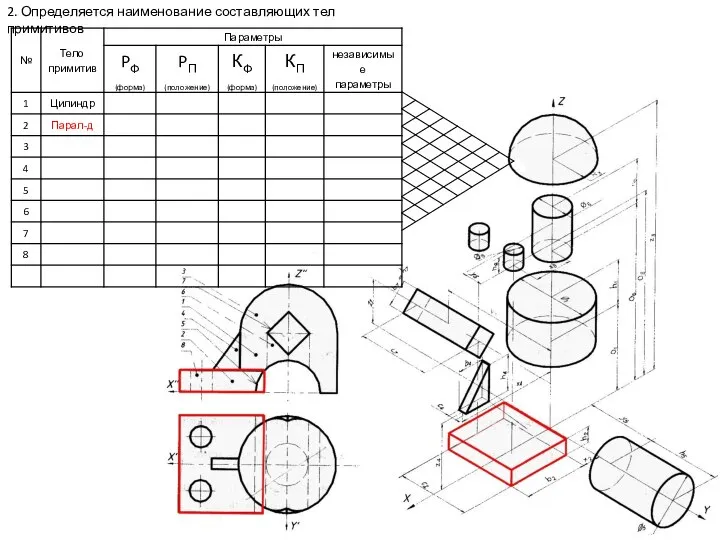
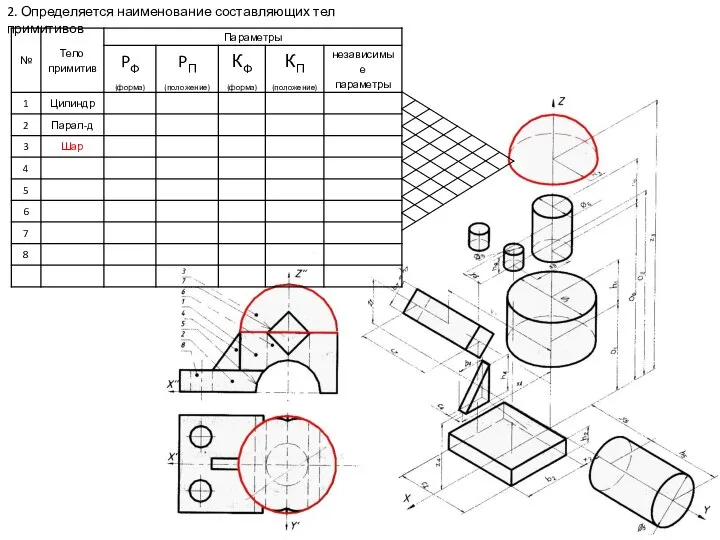
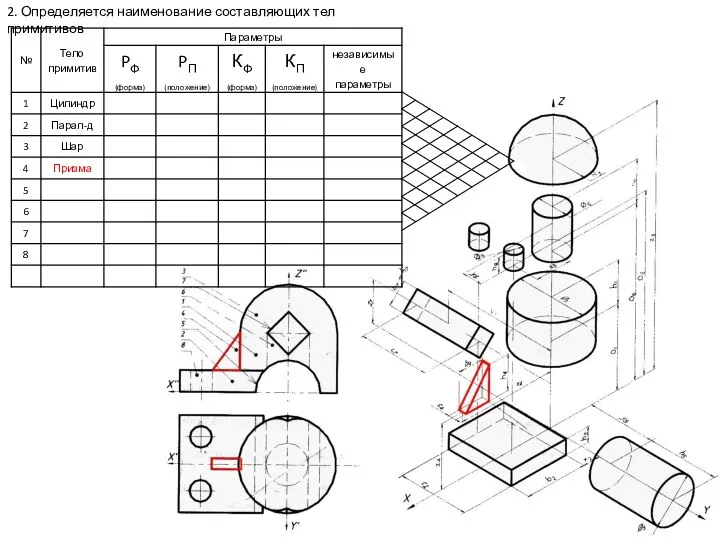
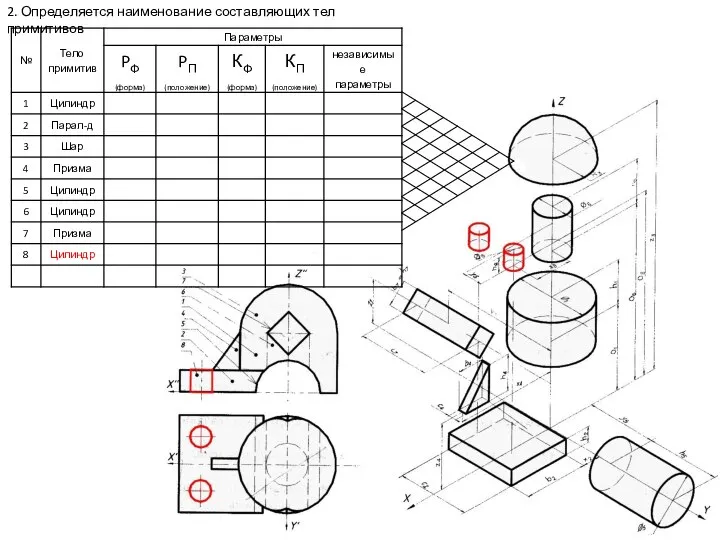
- 7. 2. Определяется наименование составляющих тел примитивов
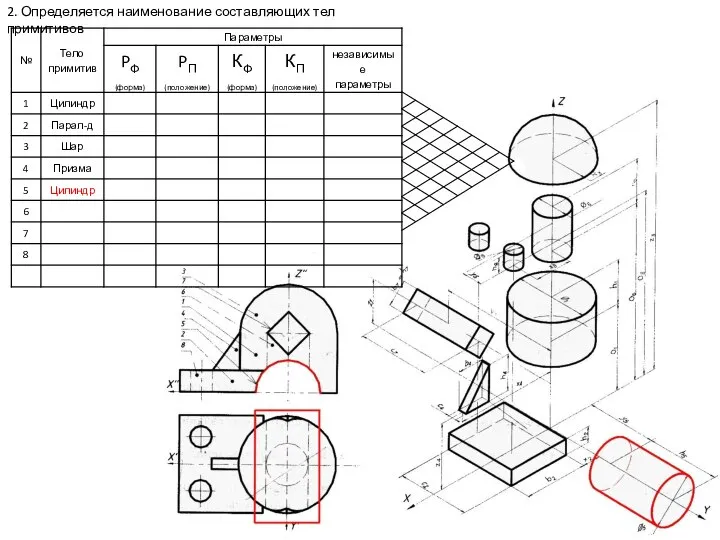
- 8. 2. Определяется наименование составляющих тел примитивов
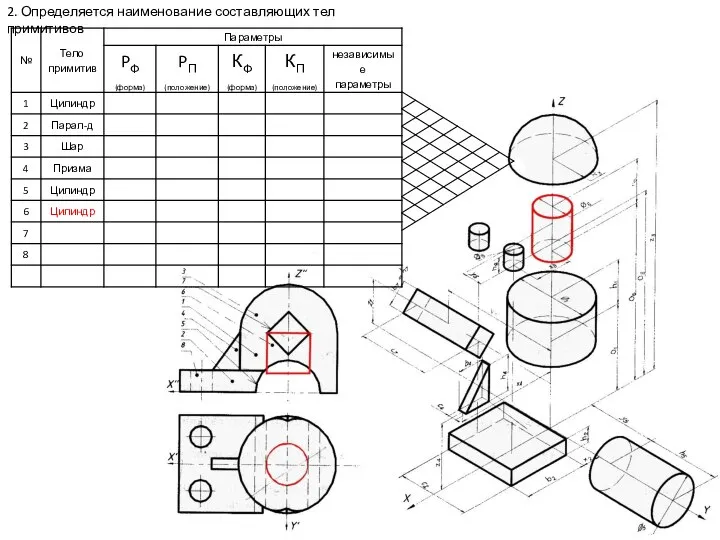
- 9. 2. Определяется наименование составляющих тел примитивов
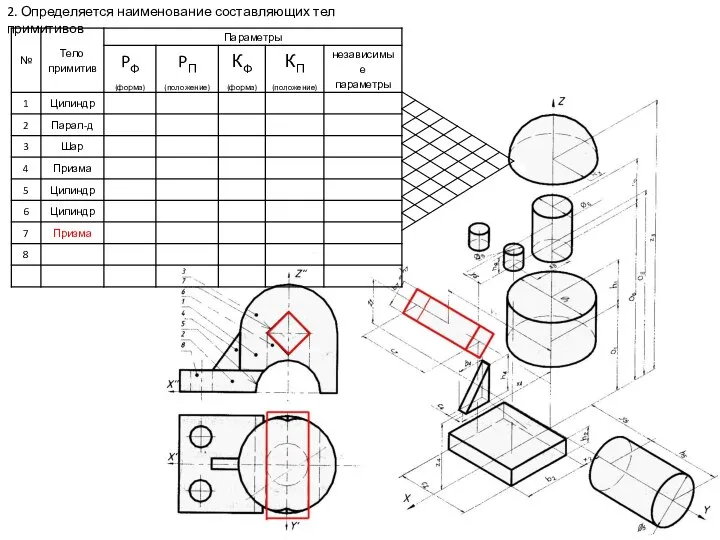
- 10. 2. Определяется наименование составляющих тел примитивов
- 11. 2. Определяется наименование составляющих тел примитивов
- 12. 2. Определяется наименование составляющих тел примитивов
- 13. 2. Определяется наименование составляющих тел примитивов
- 14. 2. Определяется наименование составляющих тел примитивов
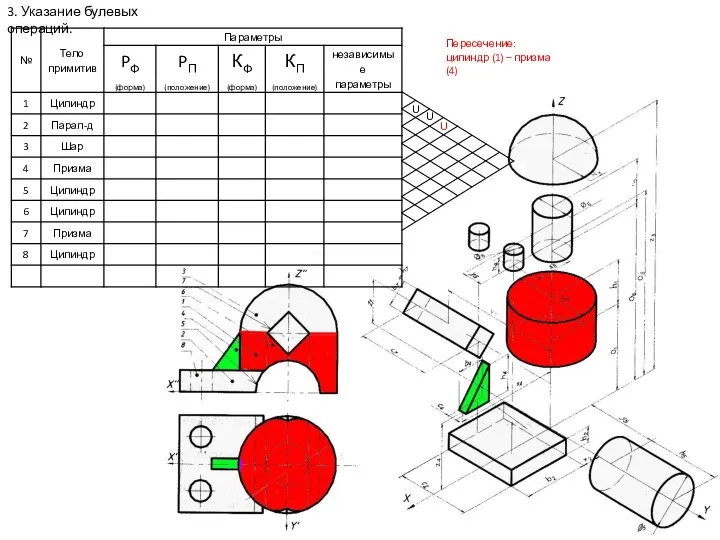
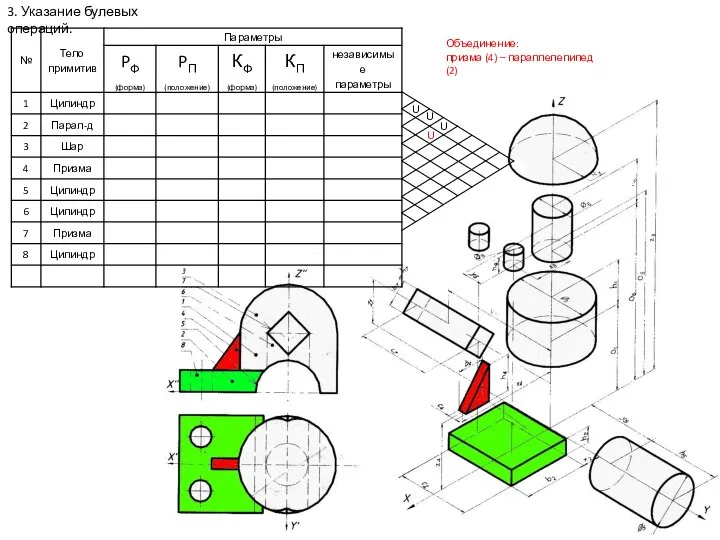
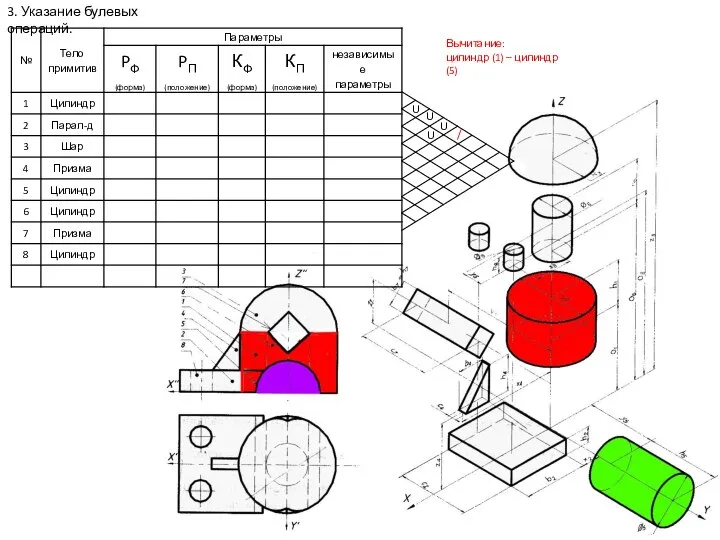
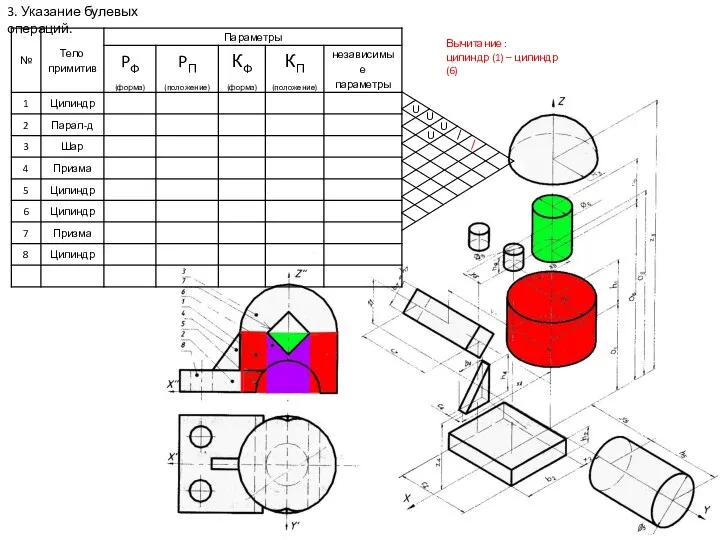
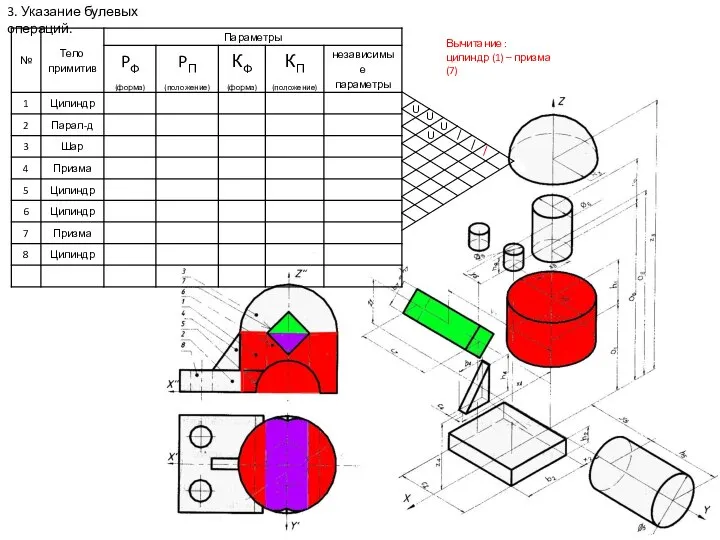
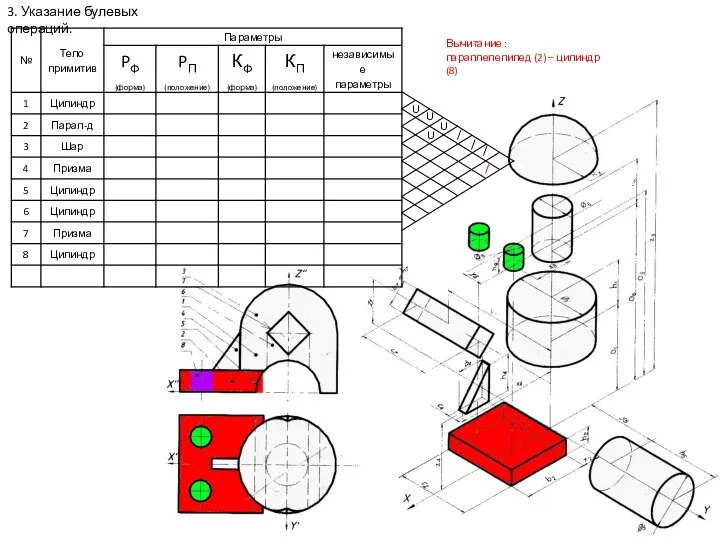
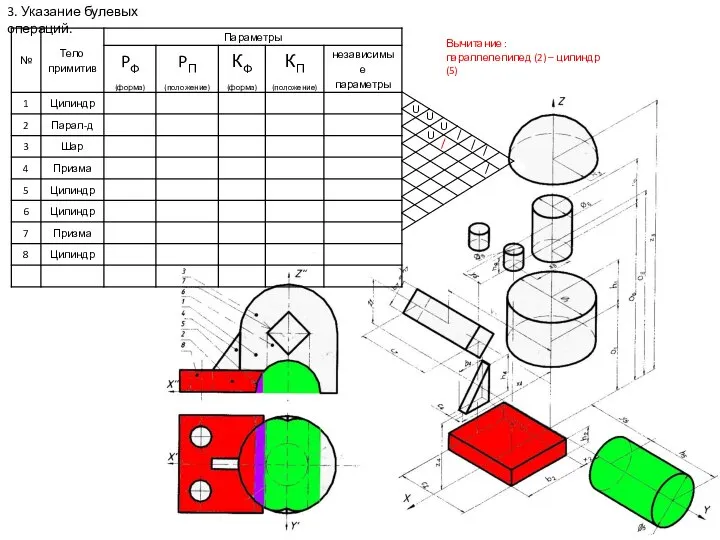
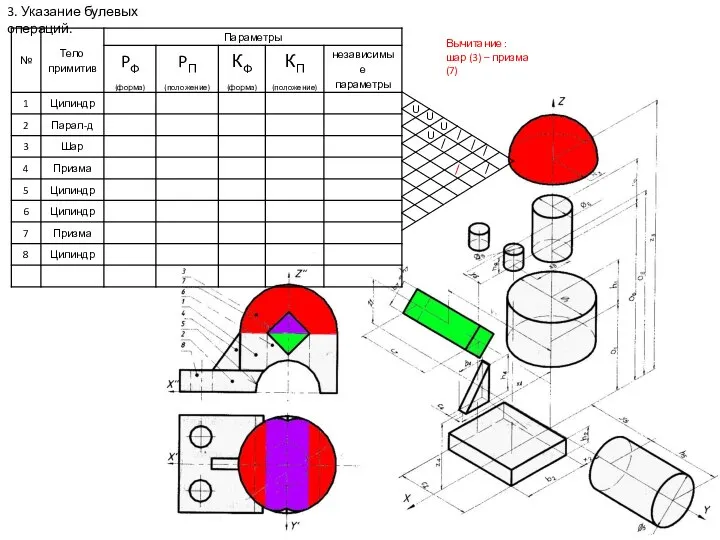
- 15. 3. Указание булевых операций.
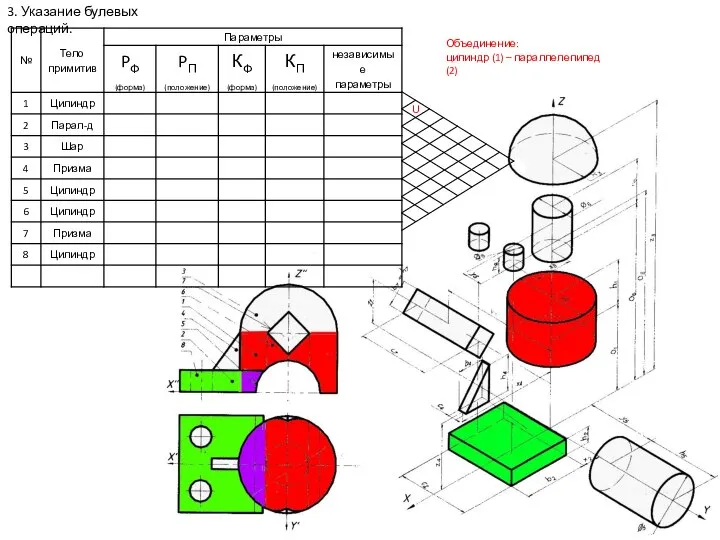
- 16. 3. Указание булевых операций. U Объединение: цилиндр (1) – параллелепипед (2)
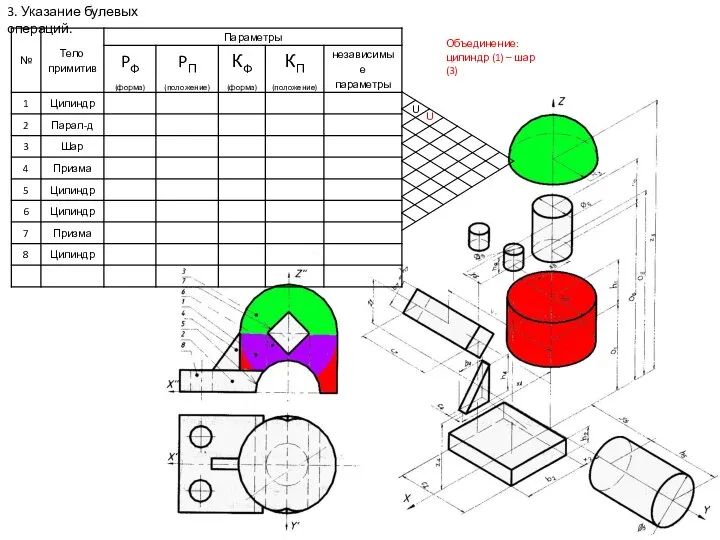
- 17. 3. Указание булевых операций. U U Объединение: цилиндр (1) – шар (3)
- 18. 3. Указание булевых операций. U U U Пересечение: цилиндр (1) – призма (4)
- 19. 3. Указание булевых операций. U U U U Объединение: призма (4) – параллелепипед (2)
- 20. 3. Указание булевых операций. U U U U Вычитание: цилиндр (1) – цилиндр (5) /
- 21. 3. Указание булевых операций. U U U U Вычитание : цилиндр (1) – цилиндр (6) /
- 22. 3. Указание булевых операций. U U U U Вычитание : цилиндр (1) – призма (7) /
- 23. 3. Указание булевых операций. U U U U Вычитание : параллелепипед (2) – цилиндр (8) /
- 24. 3. Указание булевых операций. U U U U Вычитание : параллелепипед (2) – цилиндр (5) /
- 25. 3. Указание булевых операций. U U U U Вычитание : шар (3) – призма (7) /
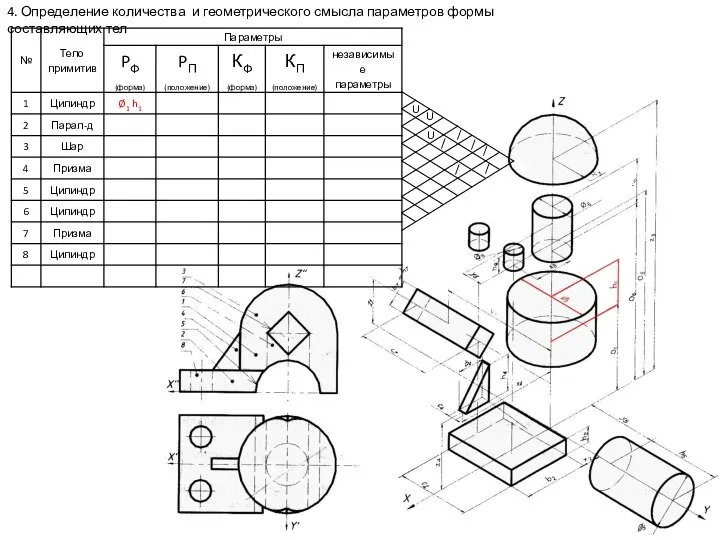
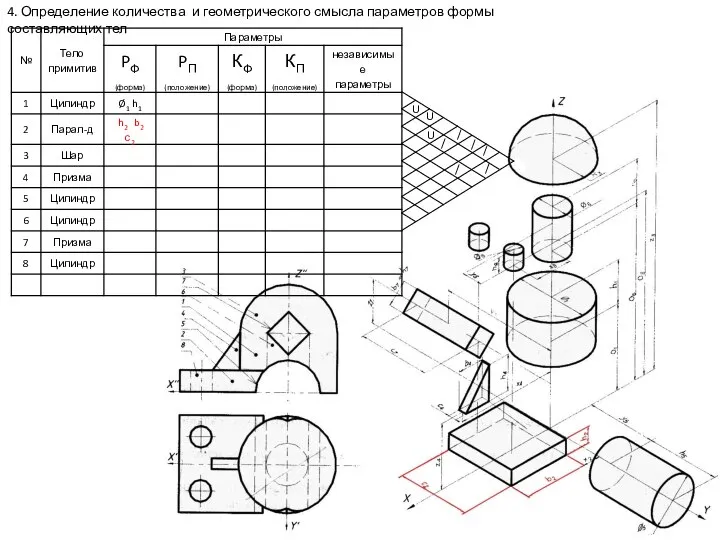
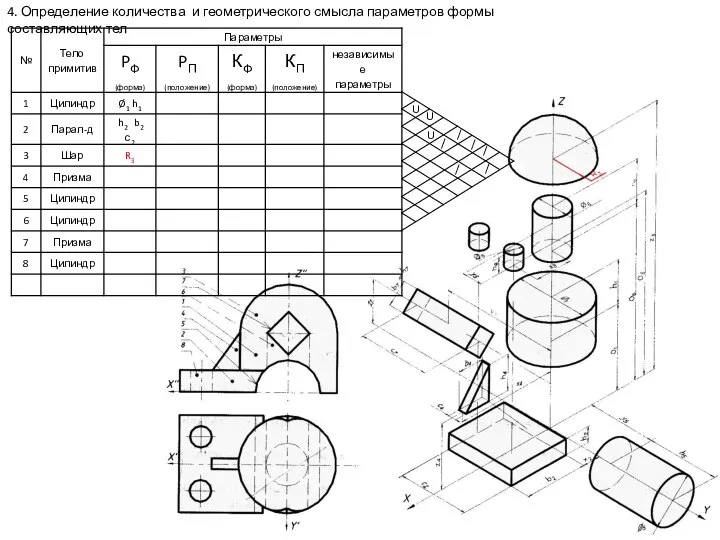
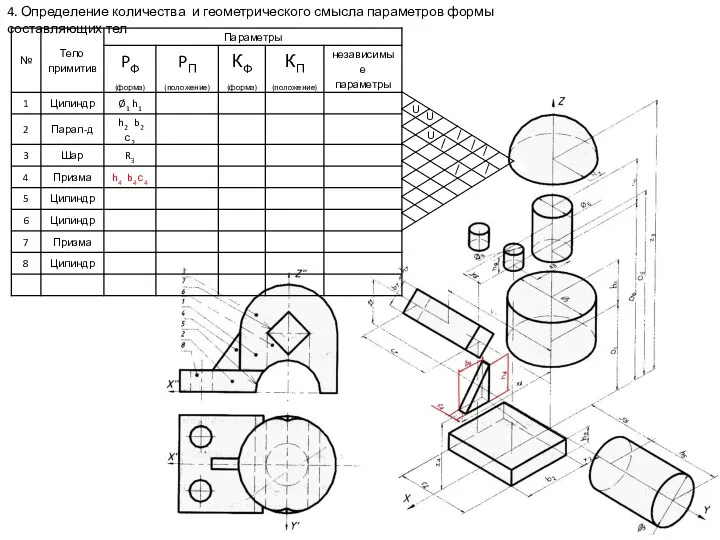
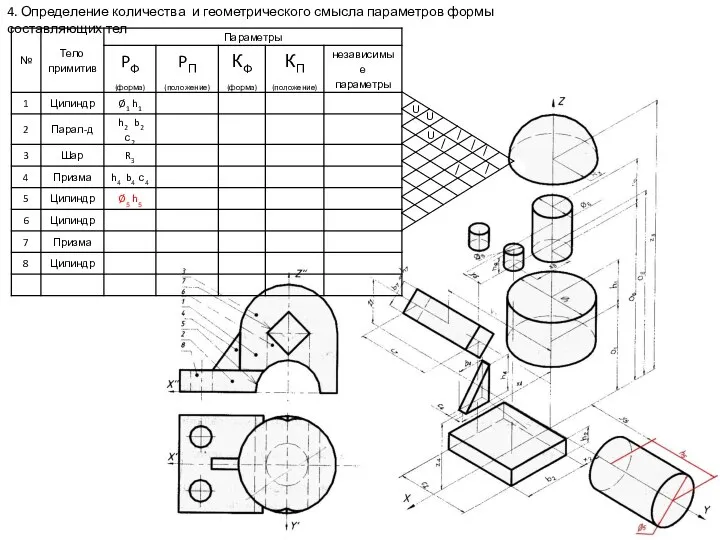
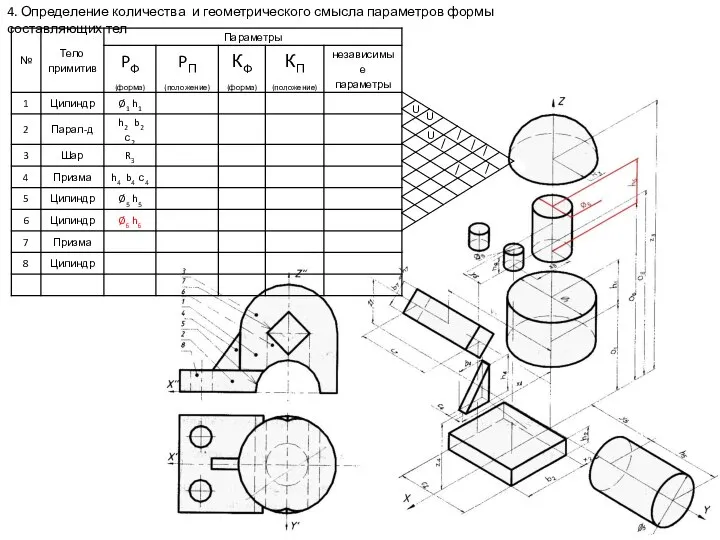
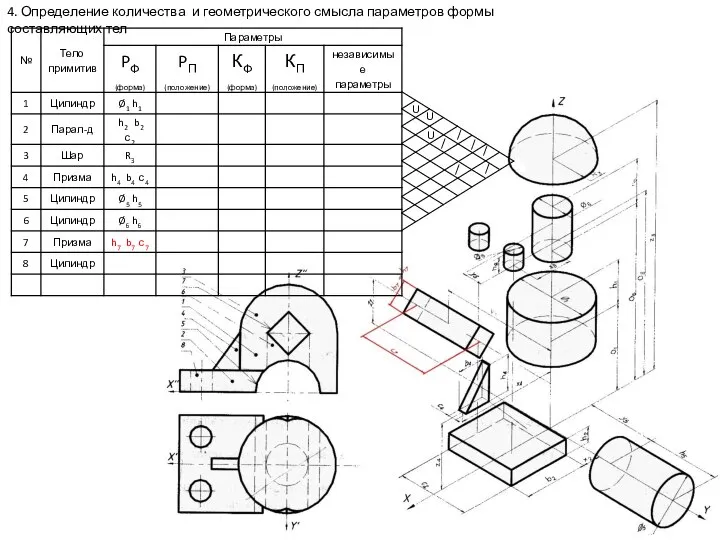
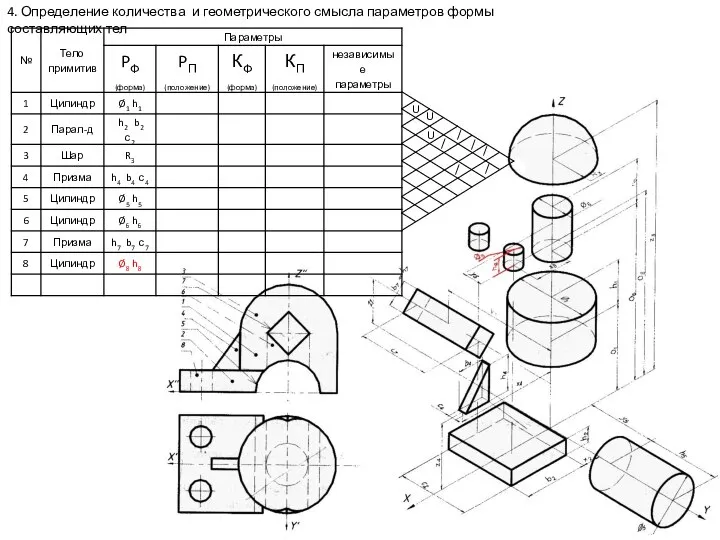
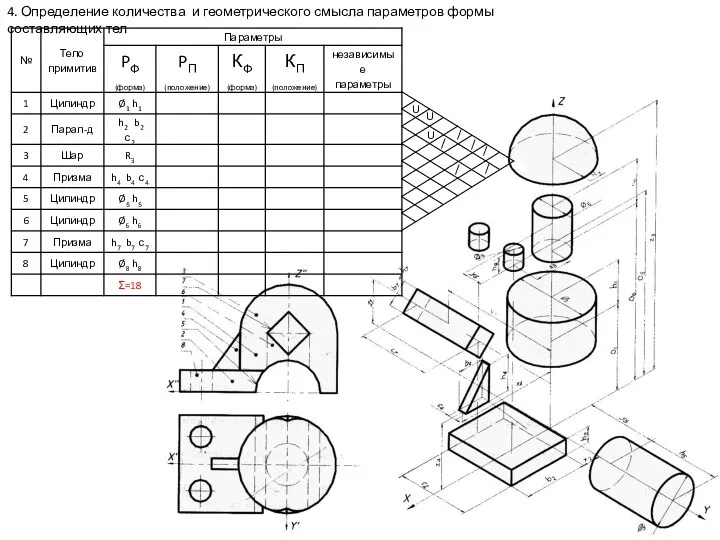
- 26. 4. Определение количества и геометрического смысла параметров формы составляющих тел;
- 27. 4. Определение количества и геометрического смысла параметров формы составляющих тел U U U / / /
- 28. 4. Определение количества и геометрического смысла параметров формы составляющих тел U U U / / /
- 29. 4. Определение количества и геометрического смысла параметров формы составляющих тел U U U / / /
- 30. 4. Определение количества и геометрического смысла параметров формы составляющих тел U U U / / /
- 31. 4. Определение количества и геометрического смысла параметров формы составляющих тел U U U / / /
- 32. 4. Определение количества и геометрического смысла параметров формы составляющих тел U U U / / /
- 33. 4. Определение количества и геометрического смысла параметров формы составляющих тел U U U / / /
- 34. 4. Определение количества и геометрического смысла параметров формы составляющих тел U U U / / /
- 35. 4. Определение количества и геометрического смысла параметров формы составляющих тел U U U / / /
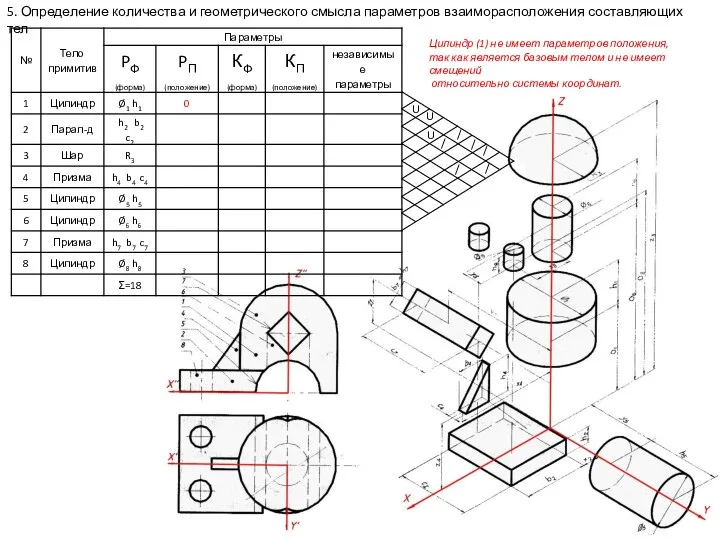
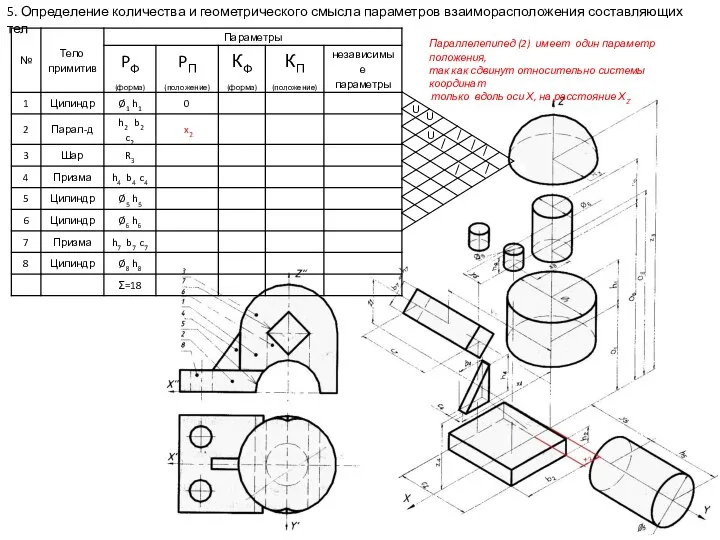
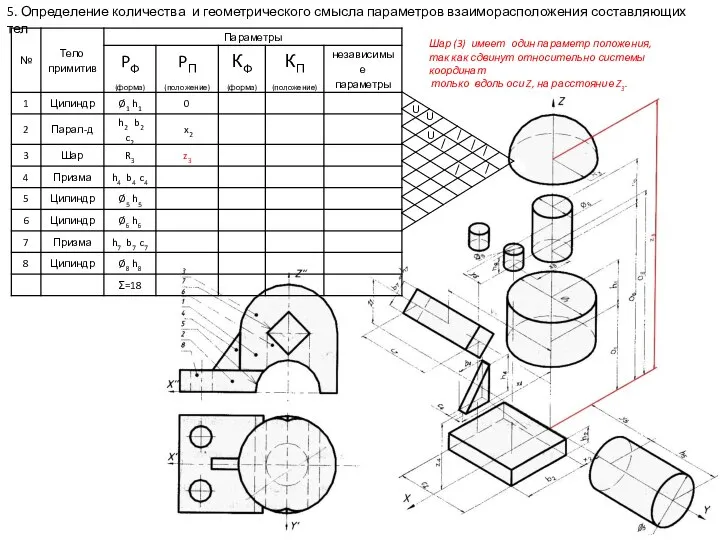
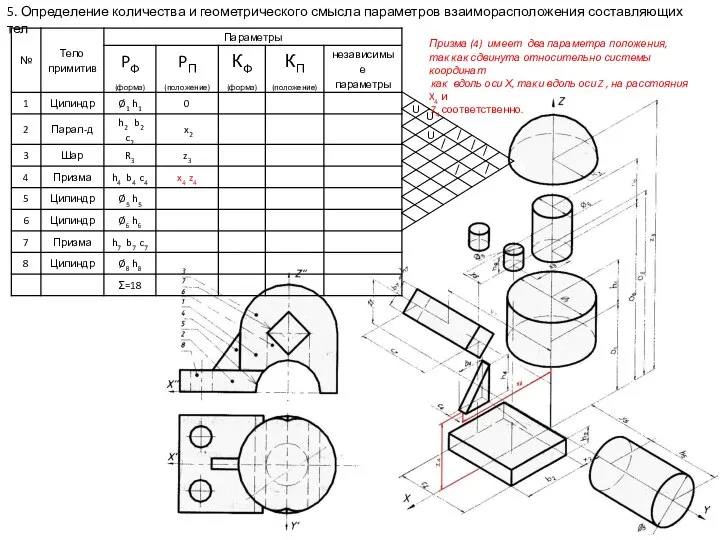
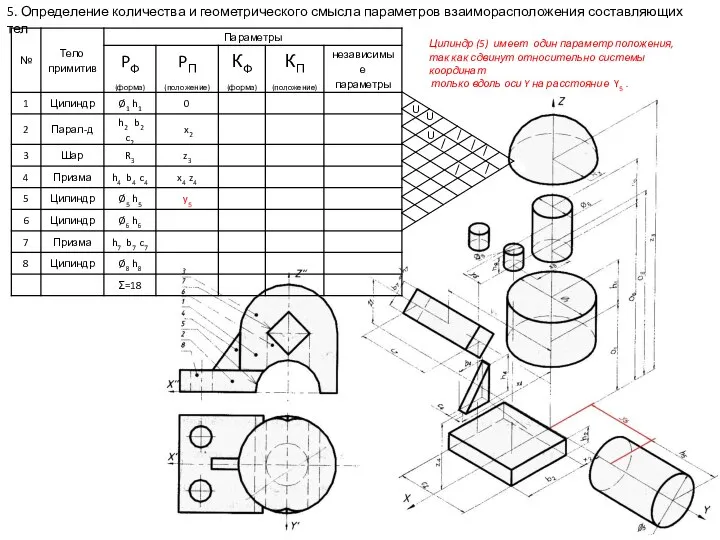
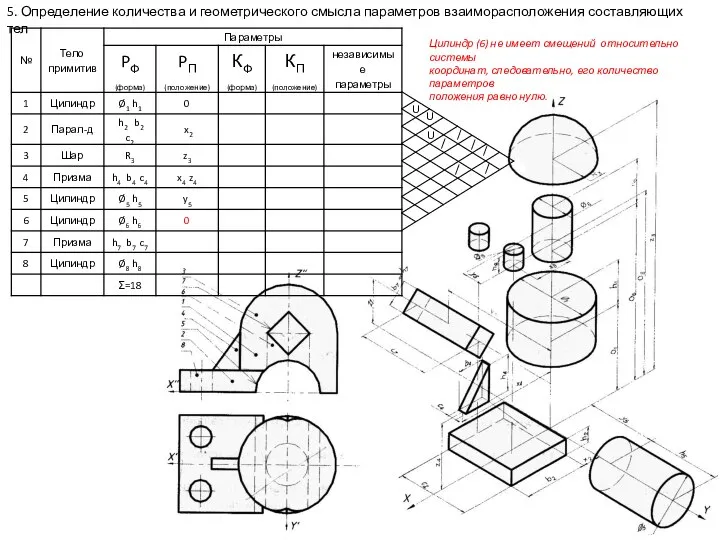
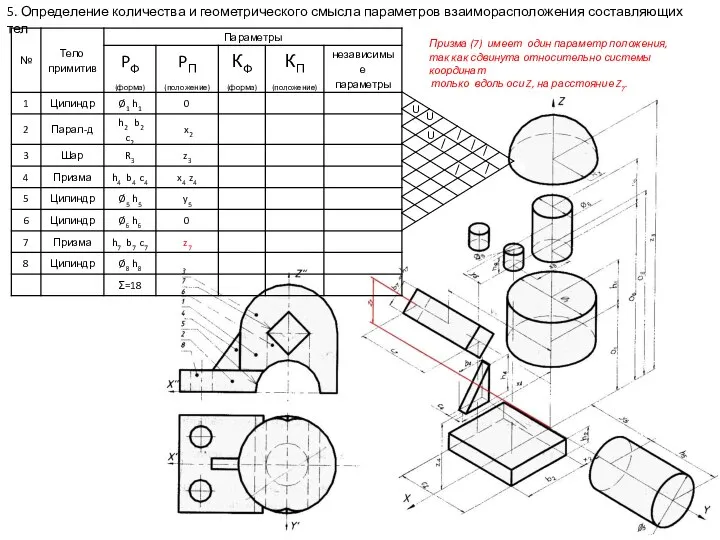
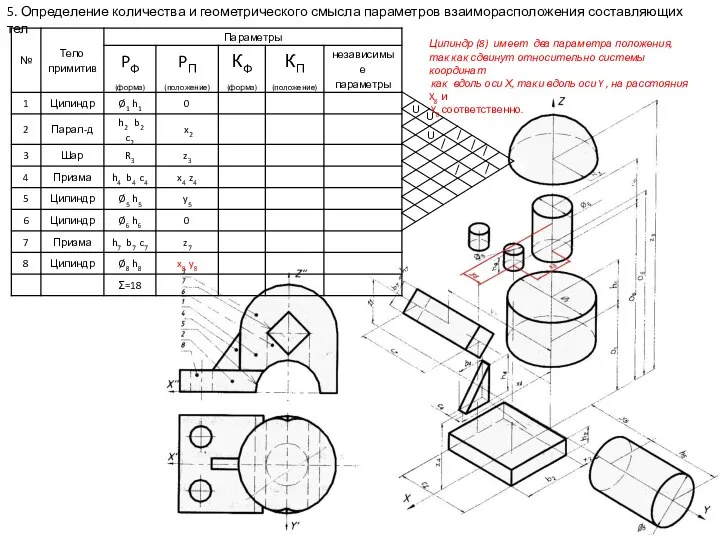
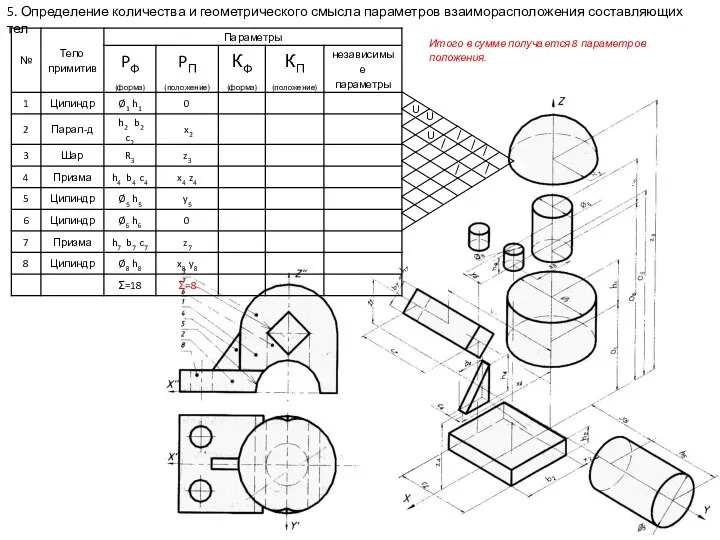
- 36. 5. Определение количества и геометрического смысла параметров взаиморасположения составляющих тел;
- 37. 5. Определение количества и геометрического смысла параметров взаиморасположения составляющих тел Цилиндр (1) не имеет параметров положения,
- 38. 5. Определение количества и геометрического смысла параметров взаиморасположения составляющих тел Параллелепипед (2) имеет один параметр положения,
- 39. 5. Определение количества и геометрического смысла параметров взаиморасположения составляющих тел Шар (3) имеет один параметр положения,
- 40. 5. Определение количества и геометрического смысла параметров взаиморасположения составляющих тел Призма (4) имеет два параметра положения,
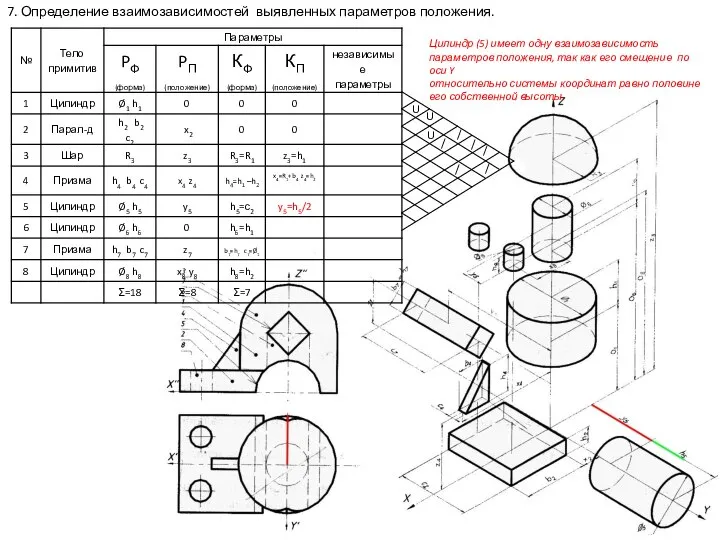
- 41. 5. Определение количества и геометрического смысла параметров взаиморасположения составляющих тел Цилиндр (5) имеет один параметр положения,
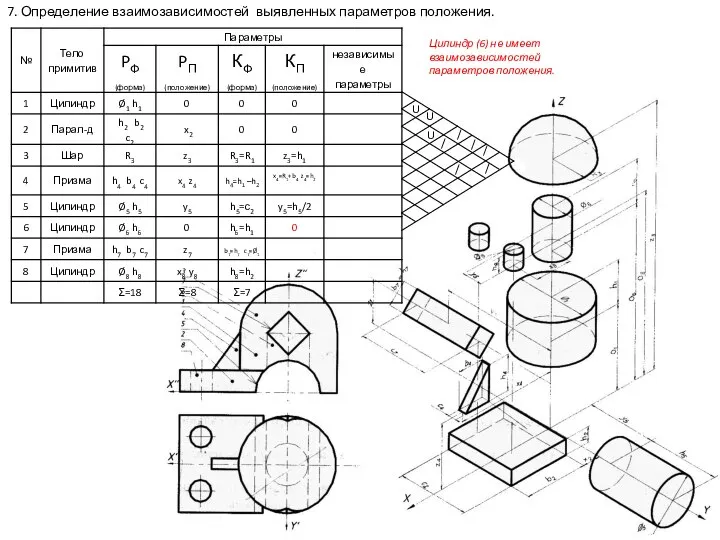
- 42. 5. Определение количества и геометрического смысла параметров взаиморасположения составляющих тел Цилиндр (6) не имеет смещений относительно
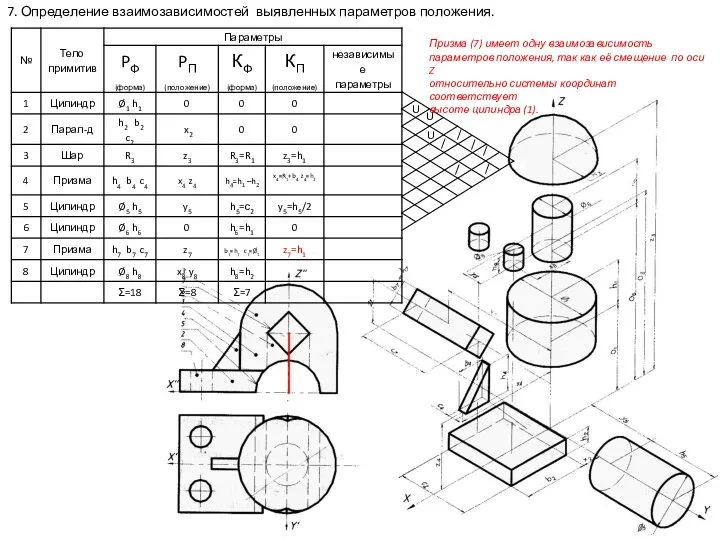
- 43. 5. Определение количества и геометрического смысла параметров взаиморасположения составляющих тел Призма (7) имеет один параметр положения,
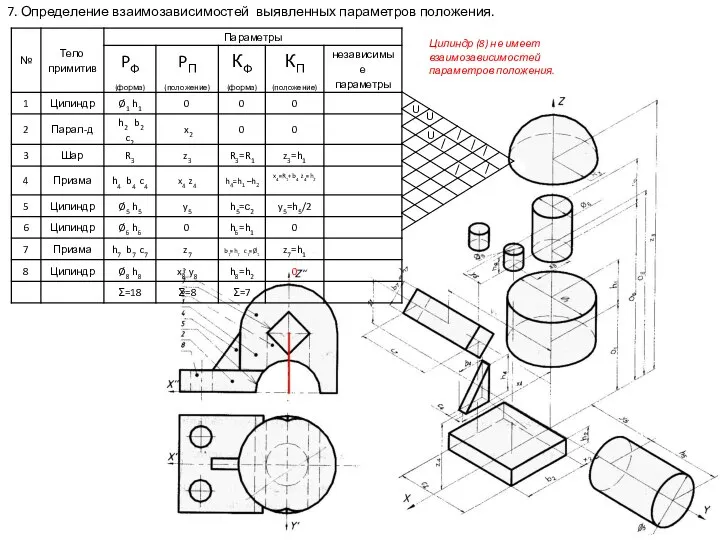
- 44. 5. Определение количества и геометрического смысла параметров взаиморасположения составляющих тел Цилиндр (8) имеет два параметра положения,
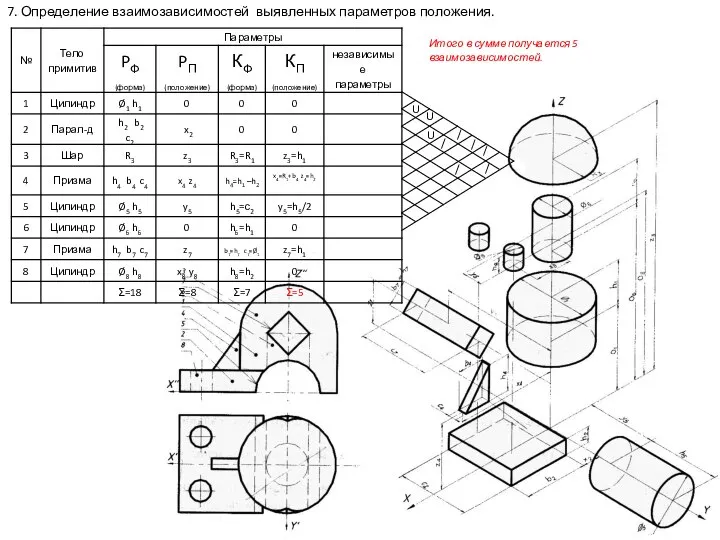
- 45. 5. Определение количества и геометрического смысла параметров взаиморасположения составляющих тел Итого в сумме получается 8 параметров
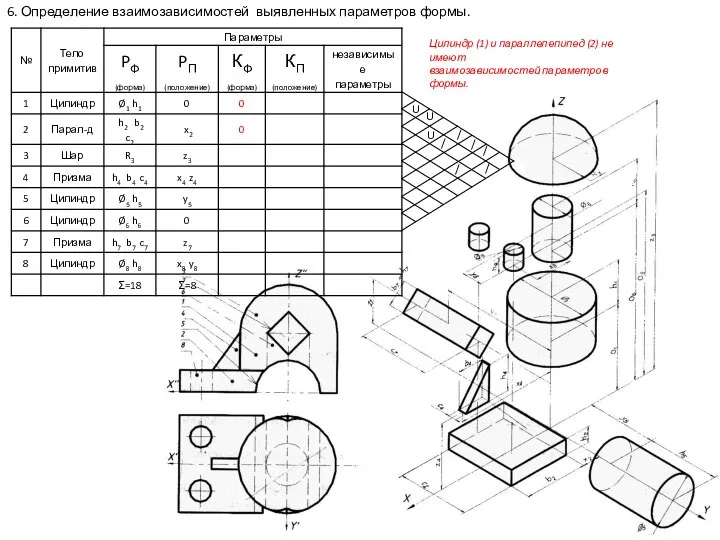
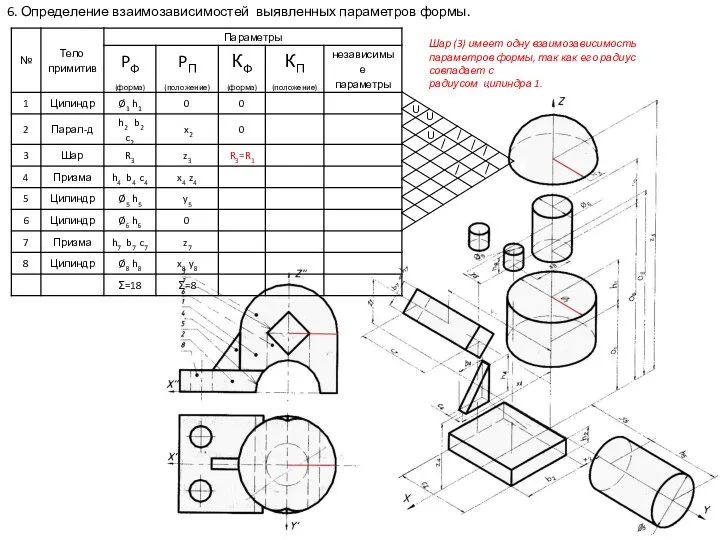
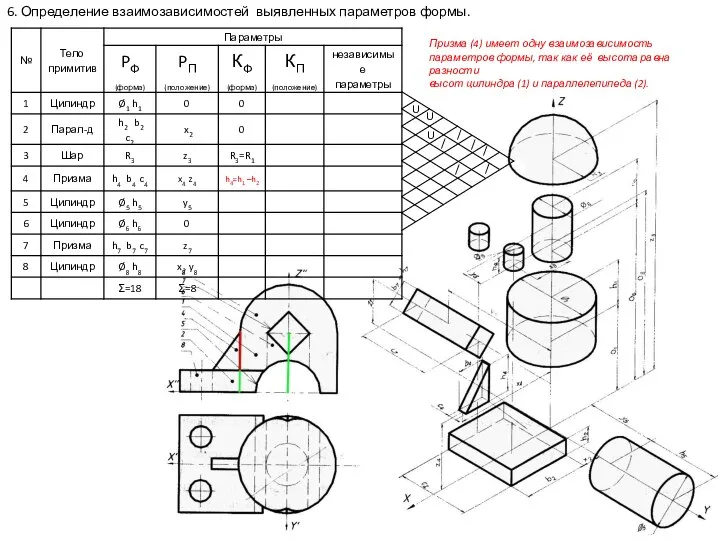
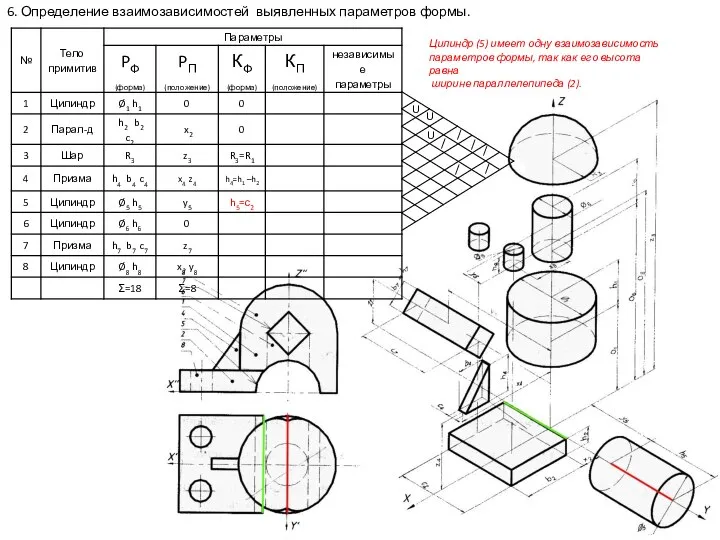
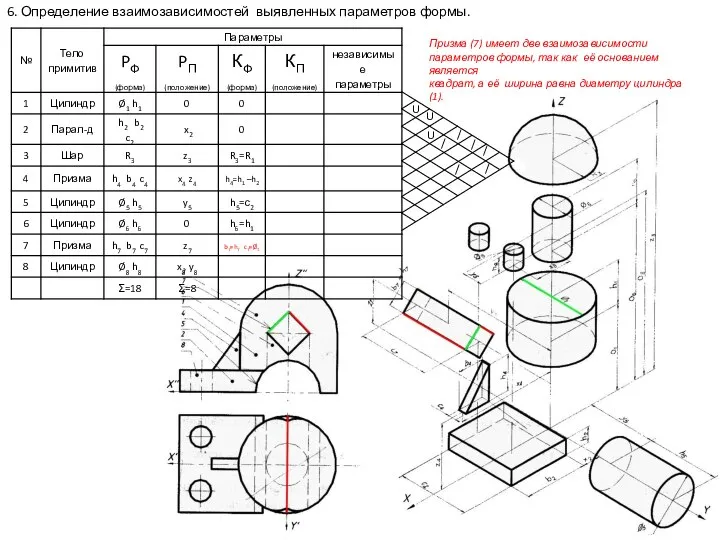
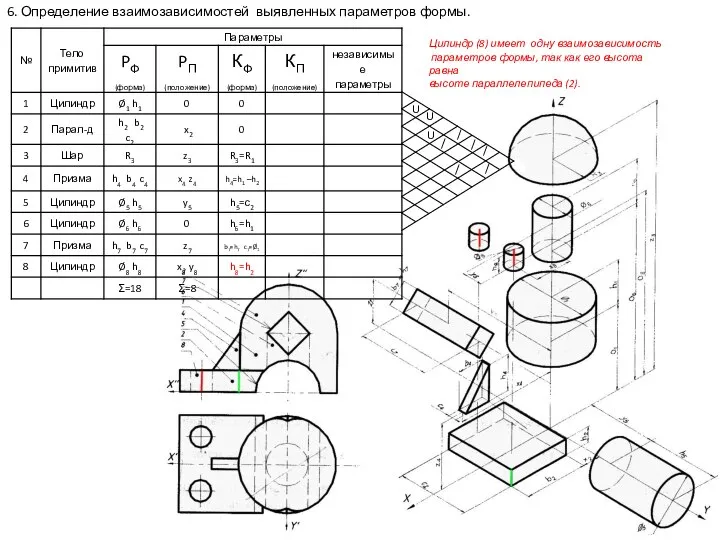
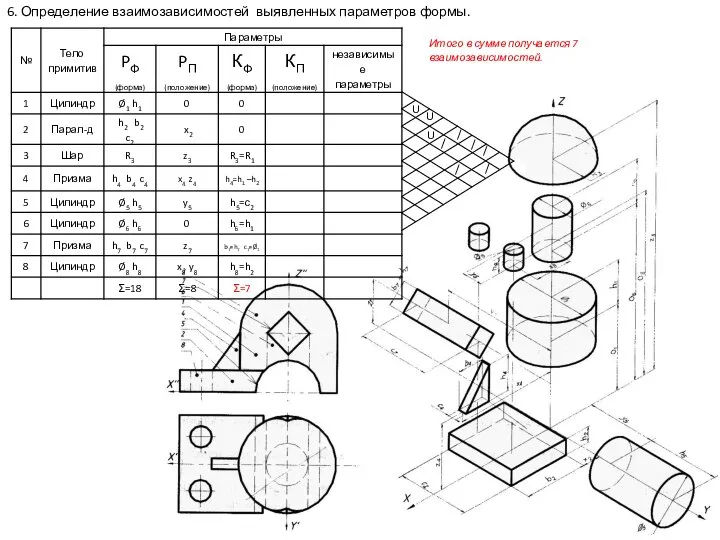
- 46. 6. Определение взаимозависимостей выявленных параметров формы;
- 47. 6. Определение взаимозависимостей выявленных параметров формы. Цилиндр (1) и параллелепипед (2) не имеют взаимозависимостей параметров формы.
- 48. 6. Определение взаимозависимостей выявленных параметров формы. Шар (3) имеет одну взаимозависимость параметров формы, так как его
- 49. 6. Определение взаимозависимостей выявленных параметров формы. Призма (4) имеет одну взаимозависимость параметров формы, так как её
- 50. 6. Определение взаимозависимостей выявленных параметров формы. Цилиндр (5) имеет одну взаимозависимость параметров формы, так как его
- 51. 6. Определение взаимозависимостей выявленных параметров формы. Призма (7) имеет две взаимозависимости параметров формы, так как её
- 52. 6. Определение взаимозависимостей выявленных параметров формы. Цилиндр (8) имеет одну взаимозависимость параметров формы, так как его
- 53. 6. Определение взаимозависимостей выявленных параметров формы. Итого в сумме получается 7 взаимозависимостей. U U U /
- 54. 7.Определение взаимозависимостей выявленных параметров положения;
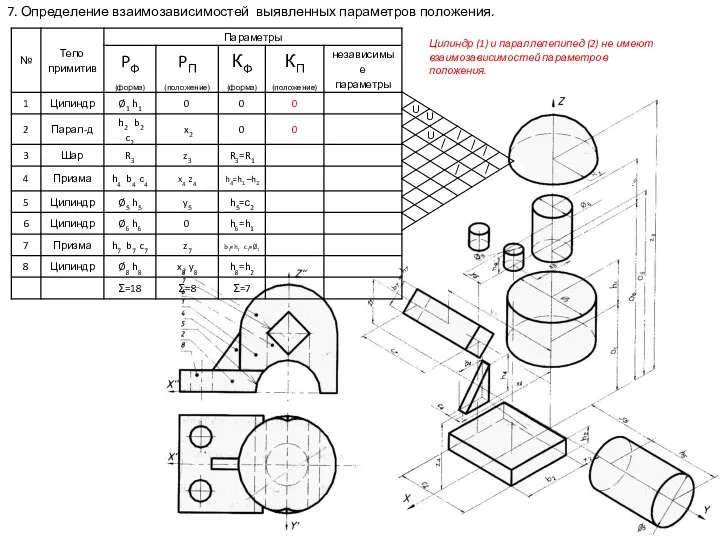
- 55. 7. Определение взаимозависимостей выявленных параметров положения. Цилиндр (1) и параллелепипед (2) не имеют взаимозависимостей параметров положения.
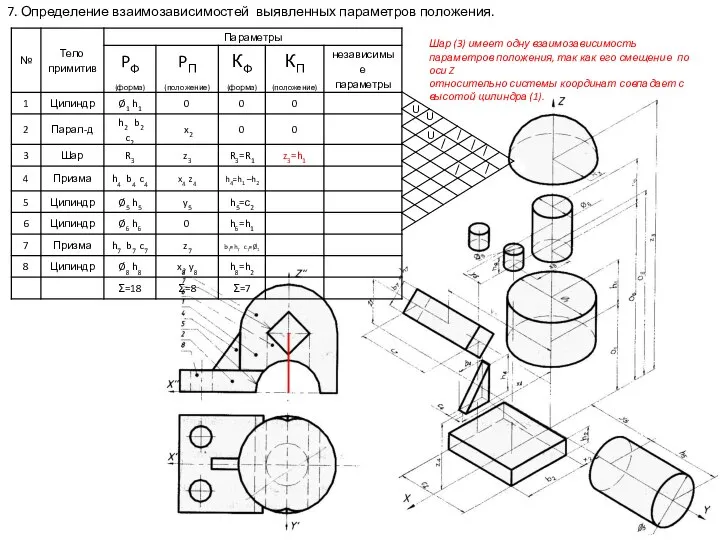
- 56. 7. Определение взаимозависимостей выявленных параметров положения. Шар (3) имеет одну взаимозависимость параметров положения, так как его
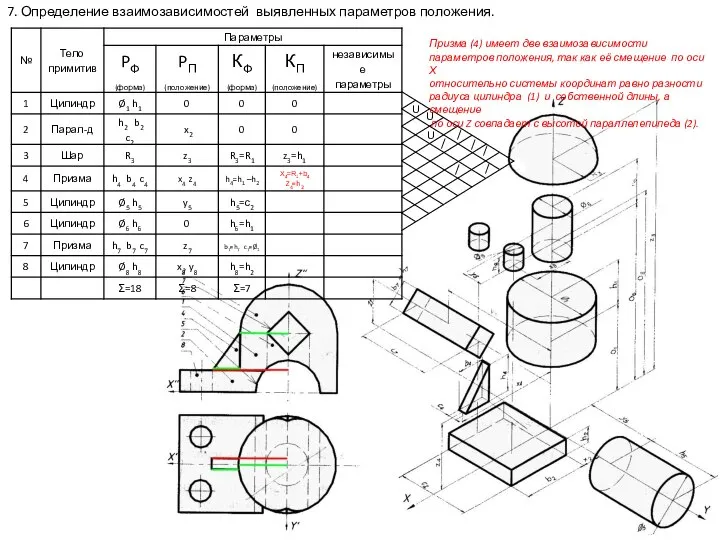
- 57. 7. Определение взаимозависимостей выявленных параметров положения. Призма (4) имеет две взаимозависимости параметров положения, так как её
- 58. 7. Определение взаимозависимостей выявленных параметров положения. Цилиндр (5) имеет одну взаимозависимость параметров положения, так как его
- 59. 7. Определение взаимозависимостей выявленных параметров положения. Цилиндр (6) не имеет взаимозависимостей параметров положения. U U U
- 60. 7. Определение взаимозависимостей выявленных параметров положения. Призма (7) имеет одну взаимозависимость параметров положения, так как её
- 61. 7. Определение взаимозависимостей выявленных параметров положения. Цилиндр (8) не имеет взаимозависимостей параметров положения. U U U
- 62. 7. Определение взаимозависимостей выявленных параметров положения. Итого в сумме получается 5 взаимозависимостей. U U U /
- 63. 8. Подсчет итогового числа параметров для каждого тела примитива . Pф+Pп-Кп-Кф
- 65. Скачать презентацию
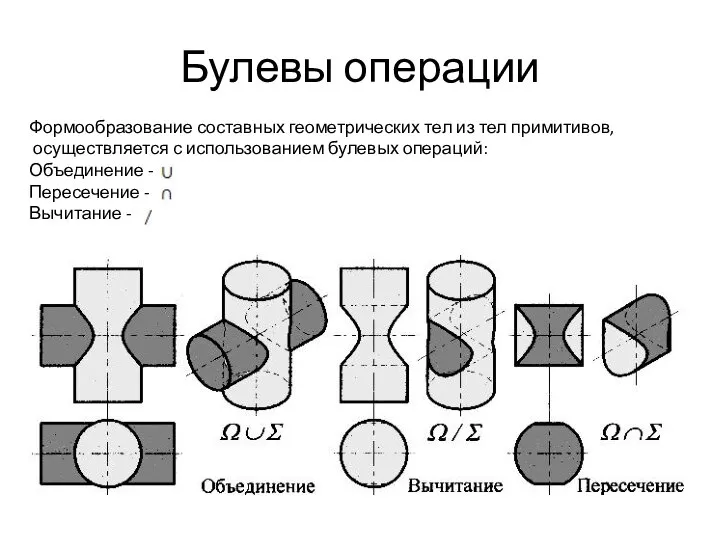
Булевы операции
Формообразование составных геометрических тел из тел примитивов,
осуществляется с использованием
Булевы операции
Формообразование составных геометрических тел из тел примитивов,
осуществляется с использованием
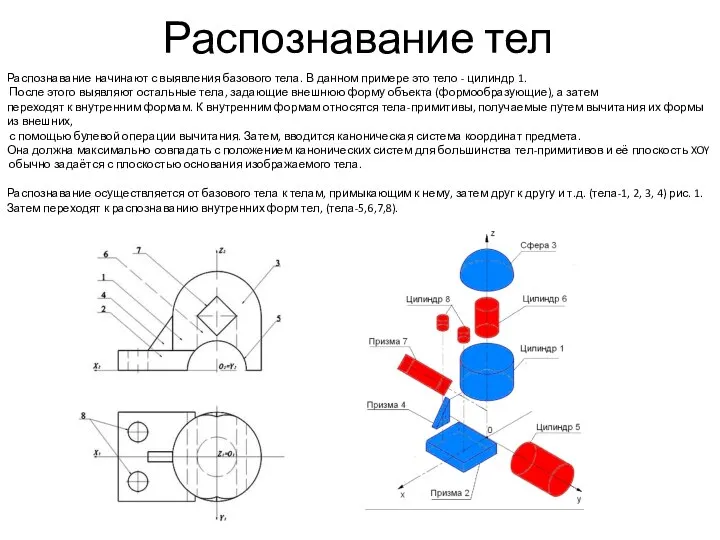
Распознавание начинают с выявления базового тела. В данном примере это тело
Распознавание начинают с выявления базового тела. В данном примере это тело
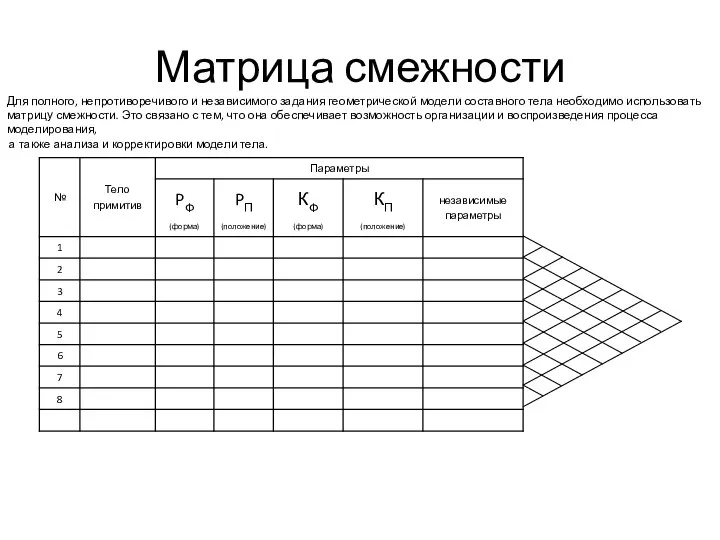
Матрица смежности
Для полного, непротиворечивого и независимого задания геометрической модели составного тела
Матрица смежности
Для полного, непротиворечивого и независимого задания геометрической модели составного тела
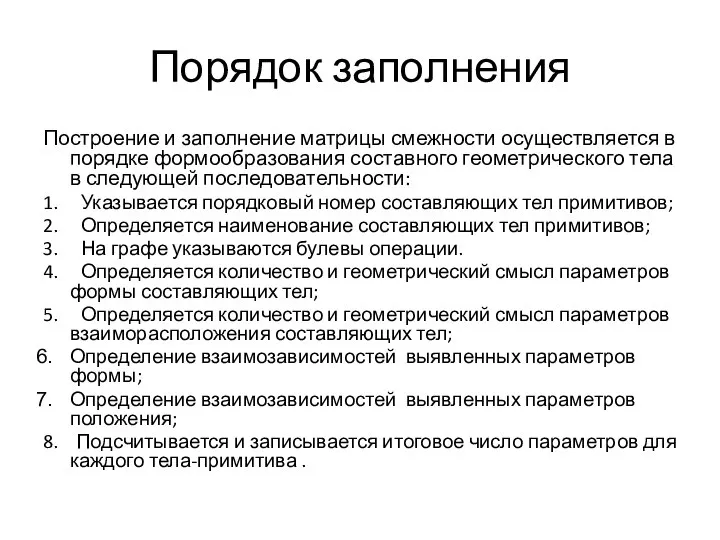
Порядок заполнения
Построение и заполнение матрицы смежности осуществляется в порядке формообразования составного
Порядок заполнения
Построение и заполнение матрицы смежности осуществляется в порядке формообразования составного
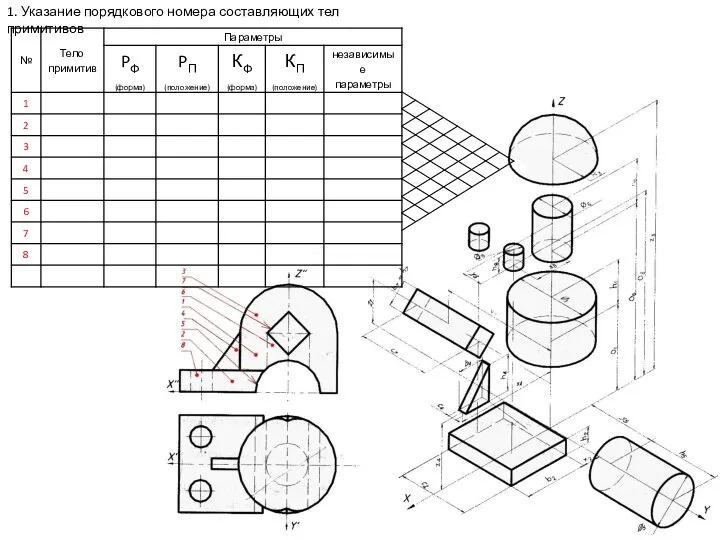
1. Указание порядкового номера составляющих тел примитивов
1. Указание порядкового номера составляющих тел примитивов
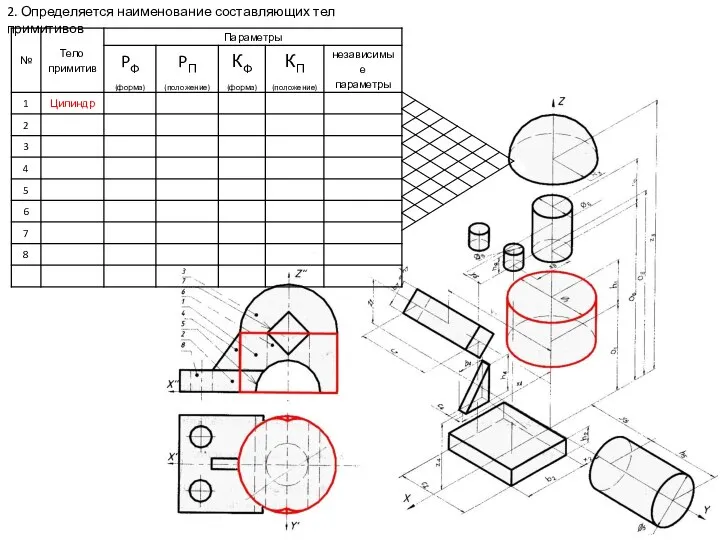
2. Определяется наименование составляющих тел примитивов
2. Определяется наименование составляющих тел примитивов
2. Определяется наименование составляющих тел примитивов
2. Определяется наименование составляющих тел примитивов
2. Определяется наименование составляющих тел примитивов
2. Определяется наименование составляющих тел примитивов
2. Определяется наименование составляющих тел примитивов
2. Определяется наименование составляющих тел примитивов
2. Определяется наименование составляющих тел примитивов
2. Определяется наименование составляющих тел примитивов
2. Определяется наименование составляющих тел примитивов
2. Определяется наименование составляющих тел примитивов
2. Определяется наименование составляющих тел примитивов
2. Определяется наименование составляющих тел примитивов
2. Определяется наименование составляющих тел примитивов
2. Определяется наименование составляющих тел примитивов
3. Указание булевых операций.
3. Указание булевых операций.
3. Указание булевых операций.
U
Объединение:
цилиндр (1) – параллелепипед (2)
3. Указание булевых операций.
U
Объединение:
цилиндр (1) – параллелепипед (2)
3. Указание булевых операций.
U
U
Объединение:
цилиндр (1) – шар (3)
3. Указание булевых операций.
U
U
Объединение:
цилиндр (1) – шар (3)
3. Указание булевых операций.
U
U
U
Пересечение:
цилиндр (1) – призма (4)
3. Указание булевых операций.
U
U
U
Пересечение:
цилиндр (1) – призма (4)
3. Указание булевых операций.
U
U
U
U
Объединение:
призма (4) – параллелепипед (2)
3. Указание булевых операций.
U
U
U
U
Объединение:
призма (4) – параллелепипед (2)
3. Указание булевых операций.
U
U
U
U
Вычитание:
цилиндр (1) – цилиндр (5)
/
3. Указание булевых операций.
U
U
U
U
Вычитание:
цилиндр (1) – цилиндр (5)
/
3. Указание булевых операций.
U
U
U
U
Вычитание :
цилиндр (1) – цилиндр (6)
/
/
3. Указание булевых операций.
U
U
U
U
Вычитание :
цилиндр (1) – цилиндр (6)
/
/
3. Указание булевых операций.
U
U
U
U
Вычитание :
цилиндр (1) – призма (7)
/
/
/
3. Указание булевых операций.
U
U
U
U
Вычитание :
цилиндр (1) – призма (7)
/
/
/
3. Указание булевых операций.
U
U
U
U
Вычитание :
параллелепипед (2) – цилиндр (8)
/
/
/
/
3. Указание булевых операций.
U
U
U
U
Вычитание :
параллелепипед (2) – цилиндр (8)
/
/
/
/
3. Указание булевых операций.
U
U
U
U
Вычитание :
параллелепипед (2) – цилиндр (5)
/
/
/
/
/
3. Указание булевых операций.
U
U
U
U
Вычитание :
параллелепипед (2) – цилиндр (5)
/
/
/
/
/
3. Указание булевых операций.
U
U
U
U
Вычитание :
шар (3) – призма (7)
/
/
/
/
/
/
3. Указание булевых операций.
U
U
U
U
Вычитание :
шар (3) – призма (7)
/
/
/
/
/
/
4. Определение количества и геометрического смысла параметров формы составляющих тел;
4. Определение количества и геометрического смысла параметров формы составляющих тел;
4. Определение количества и геометрического смысла параметров формы составляющих тел
U
U
U
/
/
/
/
/
/
4. Определение количества и геометрического смысла параметров формы составляющих тел
U
U
U
/
/
/
/
/
/
4. Определение количества и геометрического смысла параметров формы составляющих тел
U
U
U
/
/
/
/
/
/
4. Определение количества и геометрического смысла параметров формы составляющих тел
U
U
U
/
/
/
/
/
/
4. Определение количества и геометрического смысла параметров формы составляющих тел
U
U
U
/
/
/
/
/
/
4. Определение количества и геометрического смысла параметров формы составляющих тел
U
U
U
/
/
/
/
/
/
4. Определение количества и геометрического смысла параметров формы составляющих тел
U
U
U
/
/
/
/
/
/
4. Определение количества и геометрического смысла параметров формы составляющих тел
U
U
U
/
/
/
/
/
/
4. Определение количества и геометрического смысла параметров формы составляющих тел
U
U
U
/
/
/
/
/
/
4. Определение количества и геометрического смысла параметров формы составляющих тел
U
U
U
/
/
/
/
/
/
4. Определение количества и геометрического смысла параметров формы составляющих тел
U
U
U
/
/
/
/
/
/
4. Определение количества и геометрического смысла параметров формы составляющих тел
U
U
U
/
/
/
/
/
/
4. Определение количества и геометрического смысла параметров формы составляющих тел
U
U
U
/
/
/
/
/
/
4. Определение количества и геометрического смысла параметров формы составляющих тел
U
U
U
/
/
/
/
/
/
4. Определение количества и геометрического смысла параметров формы составляющих тел
U
U
U
/
/
/
/
/
/
4. Определение количества и геометрического смысла параметров формы составляющих тел
U
U
U
/
/
/
/
/
/
4. Определение количества и геометрического смысла параметров формы составляющих тел
U
U
U
/
/
/
/
/
/
4. Определение количества и геометрического смысла параметров формы составляющих тел
U
U
U
/
/
/
/
/
/
5. Определение количества и геометрического смысла параметров взаиморасположения составляющих тел;
5. Определение количества и геометрического смысла параметров взаиморасположения составляющих тел;
5. Определение количества и геометрического смысла параметров взаиморасположения составляющих тел
Цилиндр (1)
5. Определение количества и геометрического смысла параметров взаиморасположения составляющих тел
Цилиндр (1)
5. Определение количества и геометрического смысла параметров взаиморасположения составляющих тел
Параллелепипед (2)
5. Определение количества и геометрического смысла параметров взаиморасположения составляющих тел
Параллелепипед (2)
5. Определение количества и геометрического смысла параметров взаиморасположения составляющих тел
Шар (3)
5. Определение количества и геометрического смысла параметров взаиморасположения составляющих тел
Шар (3)
5. Определение количества и геометрического смысла параметров взаиморасположения составляющих тел
Призма (4)
5. Определение количества и геометрического смысла параметров взаиморасположения составляющих тел
Призма (4)
5. Определение количества и геометрического смысла параметров взаиморасположения составляющих тел
Цилиндр (5)
5. Определение количества и геометрического смысла параметров взаиморасположения составляющих тел
Цилиндр (5)
5. Определение количества и геометрического смысла параметров взаиморасположения составляющих тел
Цилиндр (6)
5. Определение количества и геометрического смысла параметров взаиморасположения составляющих тел
Цилиндр (6)
5. Определение количества и геометрического смысла параметров взаиморасположения составляющих тел
Призма (7)
5. Определение количества и геометрического смысла параметров взаиморасположения составляющих тел
Призма (7)
5. Определение количества и геометрического смысла параметров взаиморасположения составляющих тел
Цилиндр (8)
5. Определение количества и геометрического смысла параметров взаиморасположения составляющих тел
Цилиндр (8)
5. Определение количества и геометрического смысла параметров взаиморасположения составляющих тел
Итого в
5. Определение количества и геометрического смысла параметров взаиморасположения составляющих тел
Итого в
6. Определение взаимозависимостей выявленных параметров формы;
6. Определение взаимозависимостей выявленных параметров формы;
6. Определение взаимозависимостей выявленных параметров формы.
Цилиндр (1) и параллелепипед (2) не
6. Определение взаимозависимостей выявленных параметров формы.
Цилиндр (1) и параллелепипед (2) не
6. Определение взаимозависимостей выявленных параметров формы.
Шар (3) имеет одну взаимозависимость
параметров
6. Определение взаимозависимостей выявленных параметров формы.
Шар (3) имеет одну взаимозависимость
параметров
6. Определение взаимозависимостей выявленных параметров формы.
Призма (4) имеет одну взаимозависимость
параметров
6. Определение взаимозависимостей выявленных параметров формы.
Призма (4) имеет одну взаимозависимость
параметров
6. Определение взаимозависимостей выявленных параметров формы.
Цилиндр (5) имеет одну взаимозависимость
параметров
6. Определение взаимозависимостей выявленных параметров формы.
Цилиндр (5) имеет одну взаимозависимость
параметров
6. Определение взаимозависимостей выявленных параметров формы.
Призма (7) имеет две взаимозависимости
параметров
6. Определение взаимозависимостей выявленных параметров формы.
Призма (7) имеет две взаимозависимости
параметров
6. Определение взаимозависимостей выявленных параметров формы.
Цилиндр (8) имеет одну взаимозависимость
параметров
6. Определение взаимозависимостей выявленных параметров формы.
Цилиндр (8) имеет одну взаимозависимость
параметров
6. Определение взаимозависимостей выявленных параметров формы.
Итого в сумме получается 7 взаимозависимостей.
U
U
U
/
/
/
/
/
/
6. Определение взаимозависимостей выявленных параметров формы.
Итого в сумме получается 7 взаимозависимостей.
U
U
U
/
/
/
/
/
/
7.Определение взаимозависимостей выявленных параметров положения;
7.Определение взаимозависимостей выявленных параметров положения;
7. Определение взаимозависимостей выявленных параметров положения.
Цилиндр (1) и параллелепипед (2) не
7. Определение взаимозависимостей выявленных параметров положения.
Цилиндр (1) и параллелепипед (2) не
7. Определение взаимозависимостей выявленных параметров положения.
Шар (3) имеет одну взаимозависимость
параметров
7. Определение взаимозависимостей выявленных параметров положения.
Шар (3) имеет одну взаимозависимость
параметров
7. Определение взаимозависимостей выявленных параметров положения.
Призма (4) имеет две взаимозависимости
параметров
7. Определение взаимозависимостей выявленных параметров положения.
Призма (4) имеет две взаимозависимости
параметров
7. Определение взаимозависимостей выявленных параметров положения.
Цилиндр (5) имеет одну взаимозависимость
параметров
7. Определение взаимозависимостей выявленных параметров положения.
Цилиндр (5) имеет одну взаимозависимость
параметров
7. Определение взаимозависимостей выявленных параметров положения.
Цилиндр (6) не имеет взаимозависимостей
параметров
7. Определение взаимозависимостей выявленных параметров положения.
Цилиндр (6) не имеет взаимозависимостей
параметров
7. Определение взаимозависимостей выявленных параметров положения.
Призма (7) имеет одну взаимозависимость
параметров
7. Определение взаимозависимостей выявленных параметров положения.
Призма (7) имеет одну взаимозависимость
параметров
7. Определение взаимозависимостей выявленных параметров положения.
Цилиндр (8) не имеет взаимозависимостей
параметров
7. Определение взаимозависимостей выявленных параметров положения.
Цилиндр (8) не имеет взаимозависимостей
параметров
7. Определение взаимозависимостей выявленных параметров положения.
Итого в сумме получается 5 взаимозависимостей.
U
U
U
/
/
/
/
/
/
7. Определение взаимозависимостей выявленных параметров положения.
Итого в сумме получается 5 взаимозависимостей.
U
U
U
/
/
/
/
/
/
8. Подсчет итогового числа параметров для каждого тела примитива .
Pф+Pп-Кп-Кф
8. Подсчет итогового числа параметров для каждого тела примитива .
Pф+Pп-Кп-Кф
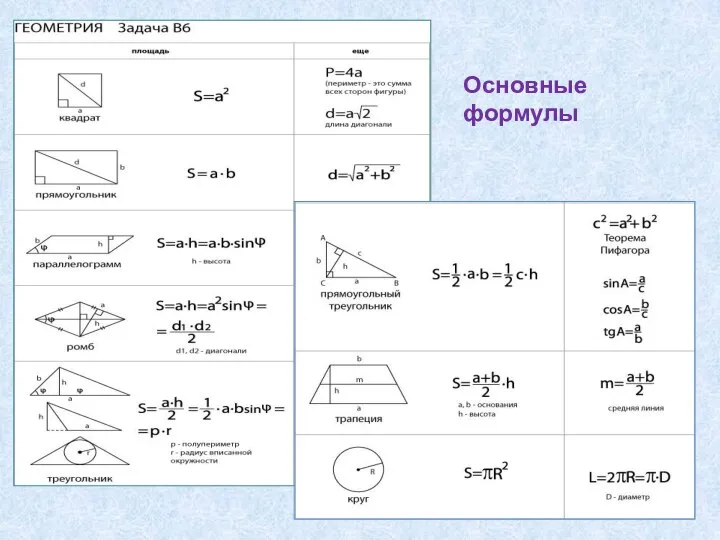 Основные формулы к задачам типа В9
Основные формулы к задачам типа В9 Применение производной к исследованию функции
Применение производной к исследованию функции Приемы устного счета (умножение) Учитель математики Бадюк Ольга Ярославна, МКОУ «Москаленский лицей»
Приемы устного счета (умножение) Учитель математики Бадюк Ольга Ярославна, МКОУ «Москаленский лицей» Вариационные ряды
Вариационные ряды Следствия из аксиом по геометрии
Следствия из аксиом по геометрии Стохастические процессы
Стохастические процессы Элементы математического анализа. Введение
Элементы математического анализа. Введение Сумма углов треугольника. 7 класс
Сумма углов треугольника. 7 класс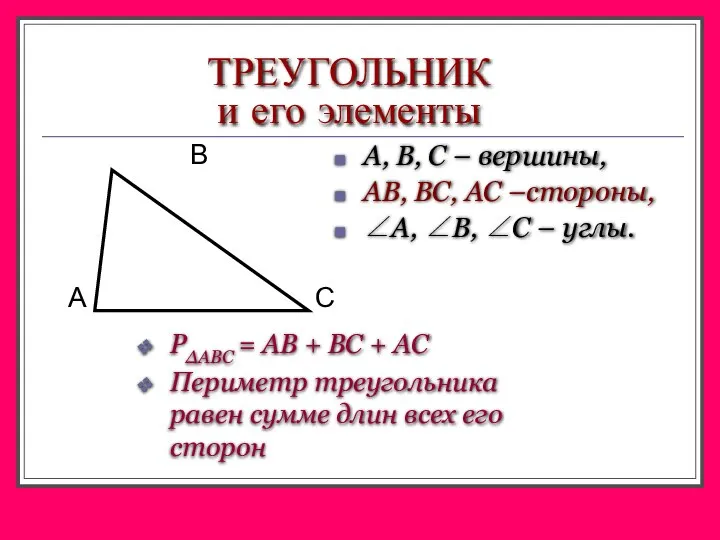 Треугольник и его элементы
Треугольник и его элементы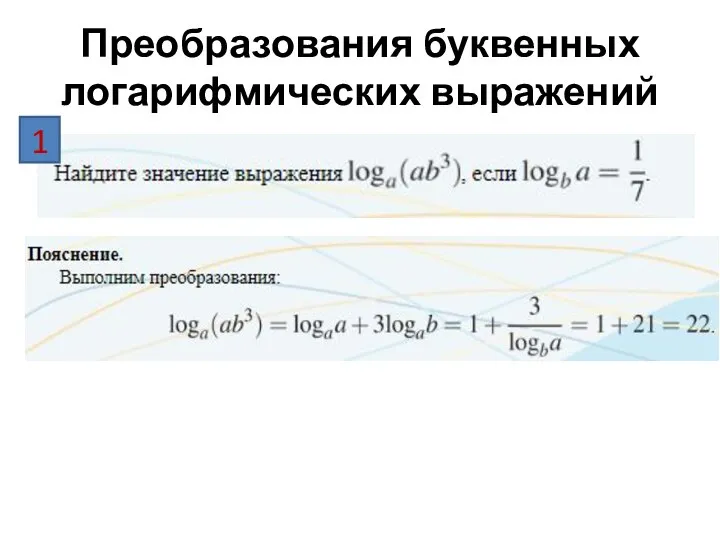 Логарифмические уравнения
Логарифмические уравнения Зачем придуманы квадратные уравнения?
Зачем придуманы квадратные уравнения? Основы математической обработки информации
Основы математической обработки информации Презентация по математике "Решение неравенств методом интервалов" - скачать бесплатно
Презентация по математике "Решение неравенств методом интервалов" - скачать бесплатно Теория вероятностей в заданиях ЕГЭ
Теория вероятностей в заданиях ЕГЭ Математикадан сыныптан тыс жұмыстар өткізудің әдістемесі; әртүрлі типтегі мектептерде математиканы оқытудың ерекшеліктері
Математикадан сыныптан тыс жұмыстар өткізудің әдістемесі; әртүрлі типтегі мектептерде математиканы оқытудың ерекшеліктері Построение сечений многогранников
Построение сечений многогранников Понятие движения
Понятие движения Сравнение дробей с одинаковыми знаменателями
Сравнение дробей с одинаковыми знаменателями Презентация на тему Задачи на смеси и сплавы
Презентация на тему Задачи на смеси и сплавы  Системы уравнений. Способы решения
Системы уравнений. Способы решения Презентация по математике "Устные упражнения на уроках геометрии. Признаки равенства треугольников" - скачать
Презентация по математике "Устные упражнения на уроках геометрии. Признаки равенства треугольников" - скачать  Линейная функция и её график
Линейная функция и её график Погрешности прямых и косвенных измерений
Погрешности прямых и косвенных измерений Правильные и неправильные дроби. Смешанные числа. 5 класс
Правильные и неправильные дроби. Смешанные числа. 5 класс Арифметическая прогрессия. Урок 3
Арифметическая прогрессия. Урок 3 Параллельность плоскостей
Параллельность плоскостей Лекция №11 по курсу Машинная арифметика в рациональных числах
Лекция №11 по курсу Машинная арифметика в рациональных числах Площадь прямоугольника
Площадь прямоугольника