- Задача двух тел. Уравнения движения в задаче двух тел

Содержание
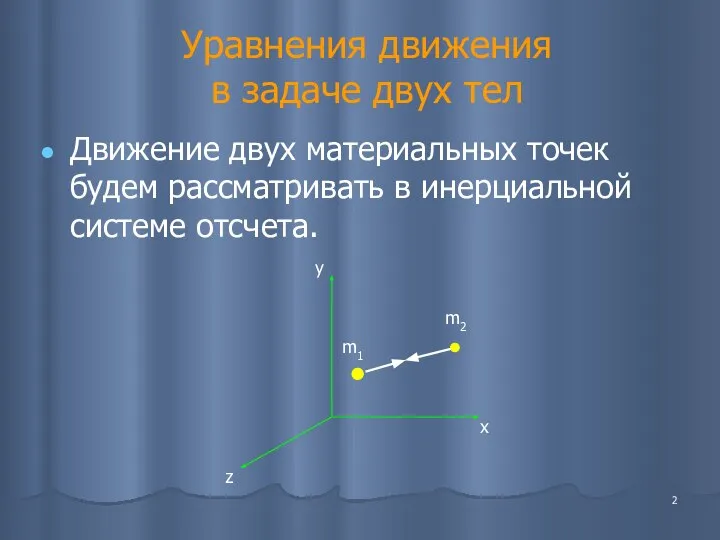
- 2. Уравнения движения в задаче двух тел Движение двух материальных точек будем рассматривать в инерциальной системе отсчета.
- 3. Массы m1 и m2 притягивают друг друга с силой Сила, действующая на тело m2 вдоль оси
- 4. Уравнения движения тела m2, притягиваемого телом m1 будут иметь вид (1)
- 5. Аналогично находим уравнения движения тела m1 под влиянием притяжения от тела m2 (2)
- 6. Вычитая из (1) уравнения (2) находим уравнения движения тела m2 относительно m1
- 7. Вводя обозначения и окончательно получим (3)
- 8. Интегралы площадей Умножаем первое уравнение системы (3) на –y, второе – на x, и складываем их.
- 9. Интегралы площадей В итоге получим: Интегрируя эти соотношения, находим (4)
- 10. Домножаем равенства (4) на z, x, y соответственно и складываем (5) получим:
- 11. Это уравнение плоскости, проходящей через начало координат. В этой плоскости происходит движение тела m2. Постоянные а1,
- 12. Обозначим через ΔА – площадь треугольника OPQ, описанного радиус-вектором за время Δt. Из треугольника OPR имеем
- 13. Перепишем последнее равенство в виде: При отношение площади треугольника к площади сектора , В пределе при
- 14. Посмотрим теперь как будет выглядеть последнее выражение в прямоугольных координатах: Отсюда: В итоге находим: (!!!)
- 15. Постоянные а1, а2, а3 – проекции удвоенной секториальной скорости на плоскости xy, yz и zx! Поэтому
- 16. Ω – долгота восходящего узла, отсчитывается от оси x в сторону оси y (0°≤Ω≤360°); i –
- 17. Поворот вокруг оси Sz на угол Ω (8)
- 18. В матричной форме этот поворот можно записать следующим образом: (9)
- 19. Поворот вокруг оси Sx’ на угол i В матричной форме: (10) (11)
- 20. Таким образом, после двух поворотов, имеем: Перемножив поворотные матрицы получим: (12)
- 21. Так как компоненты удвоенной секториальной скорости в системе координат Oxyz есть а1, а2, а3, а в
- 22. Перепишем теперь интегралы площадей: (14) Осталось связать здесь с элементами орбиты постоянную c. Для этого найдем
- 23. Умножим первое, второе и третье уравнения системы (3) на Сложив, получим:
- 24. можно переписать в виде: Правую – в виде: Левую часть равенства
- 25. Таким образом, имеем: Интегрирование последнего выражения дает нам интеграл энергии: (15) Здесь – постоянная интеграла энергии.
- 26. Так как движение происходит в плоскости, то координата z″=0, а радиус-вектор Интеграл площадей и интеграл живых
- 27. Перейдем теперь от прямоугольных координат x″, y″ к полярным координатам r, u Интеграл площадей и интеграл
- 28. Из равенств (16) и (17) имеем Таким образом При помощи (16) можно найти (18)
- 29. Уравнение (18) можно переписать в виде: Преобразуем подкоренное выражение: Обозначим:
- 30. Имеем: Далее Введем замену Получим: или
- 31. Последнее выражение можно проинтегрировать где ω – постоянная интегрирования. Отсюда Но Поэтому
- 32. или Отсюда Сравнивая теперь со стандартным уравнением конического сечения где – параметр орбиты – большая полуось
- 33. находим: Здесь ω – аргумент перицентра (угловое расстояние перицентра от узла). – аргумент широты. Т.о. мы
- 34. С этими постоянными интеграл энергии Уравнение траектории (19) (20) (21) Уравнение интеграла площадей:
- 35. Введем для случая эллиптического движения некоторую вспомогательную переменную – эксцентрическую аномалию E: Из рис. видно, что
- 36. Отношение малой и большой полуоси будет: Здесь Отсюда имеем: (23) Возводя (22) и (23) в квадрат
- 37. x2/a2+y2/b2=1 – уравнение эллипса x'2/a2+y'2/a2=1 – уравнение окружности x=x' y=MN y‘=M‘N
- 38. Подставляя (24) в (22) и (23), получим соотношения, связывающие истинную и эксцентрическую аномалии: (25) Можно найти
- 39. Делим первое на второе: Используя тригонометрические соотношения окончательно находим: (26) (25’)
- 40. Найдем теперь уравнение, связывающее переменную E со временем. Дифференцируя соотношение (26) получим: Отсюда
- 41. Из интеграла площадей (21) Учитывая, что Имеем
- 42. Используя также выражение для радиус-вектора (24) Откуда имеем и второе из соотношений (25’) находим:
- 43. Интегрируя, находим: (27) Здесь – постоянная интегрирования (момент прохождения через перигелий), а само уравнение – знаменитое
- 44. Поворот системы координат Sx″y″z″ вокруг оси Sz″ на угол ω: В матричной форме:
- 45. Таким образом, получить выражения для координат x, y, z через элементы орбиты можно при помощи трех
- 46. Так как движение в задаче двух тел происходит в плоскости, то в прямоугольной орбитальной системе координат
- 47. Уравнение Кеплера, связывающее эксцентрическую аномалию и время, обычно записывают в виде: где Величина есть среднее движение
- 48. Формулы, связывающие координаты x, y, z с элементами орбиты
- 49. Формулы для скоростей находим дифференцированием формул для координат
- 50. Формулы для координат и скоростей представляют также в виде Проективные коэффициенты
- 52. Скачать презентацию
Уравнения движения
в задаче двух тел
Движение двух материальных точек будем рассматривать в
Уравнения движения
в задаче двух тел
Движение двух материальных точек будем рассматривать в
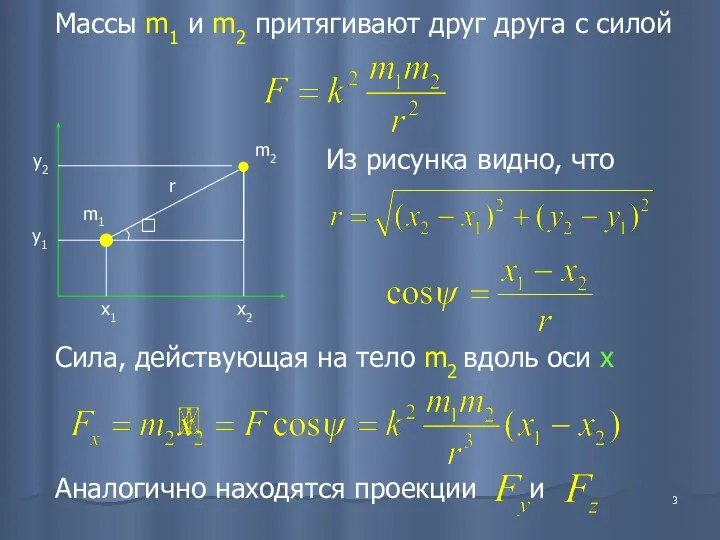
Массы m1 и m2 притягивают друг друга с силой
Сила, действующая на
Массы m1 и m2 притягивают друг друга с силой
Сила, действующая на
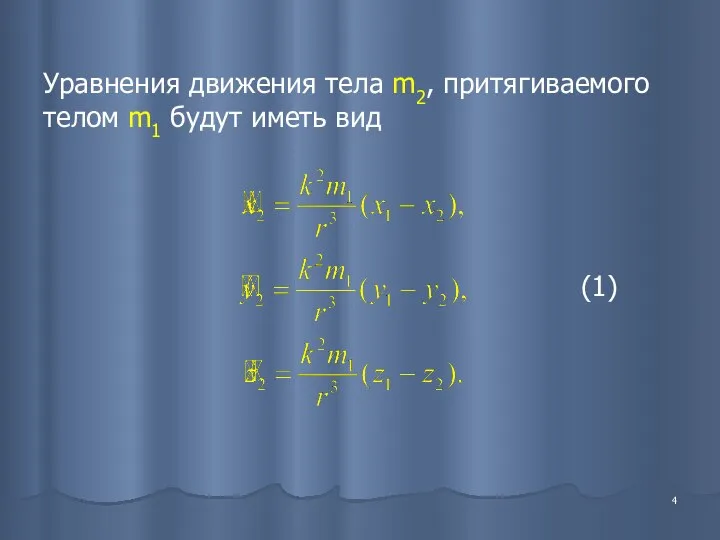
Уравнения движения тела m2, притягиваемого телом m1 будут иметь вид
(1)
Уравнения движения тела m2, притягиваемого телом m1 будут иметь вид
(1)
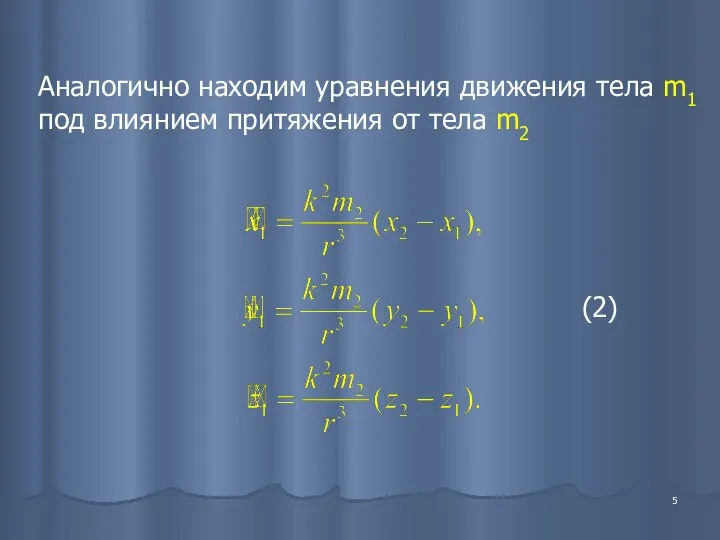
Аналогично находим уравнения движения тела m1 под влиянием притяжения от тела
Аналогично находим уравнения движения тела m1 под влиянием притяжения от тела
Вычитая из (1) уравнения (2) находим уравнения движения тела m2 относительно
Вычитая из (1) уравнения (2) находим уравнения движения тела m2 относительно
Вводя обозначения
и
окончательно получим
(3)
Вводя обозначения
и
окончательно получим
(3)
Интегралы площадей
Умножаем первое уравнение системы (3) на –y, второе – на
Интегралы площадей
Умножаем первое уравнение системы (3) на –y, второе – на
Интегралы площадей
В итоге получим:
Интегрируя эти соотношения, находим
(4)
Интегралы площадей
В итоге получим:
Интегрируя эти соотношения, находим
(4)
Домножаем равенства (4) на z, x, y соответственно и складываем
(5)
получим:
Домножаем равенства (4) на z, x, y соответственно и складываем
(5)
получим:
Это уравнение плоскости, проходящей через начало координат. В этой плоскости происходит
Это уравнение плоскости, проходящей через начало координат. В этой плоскости происходит
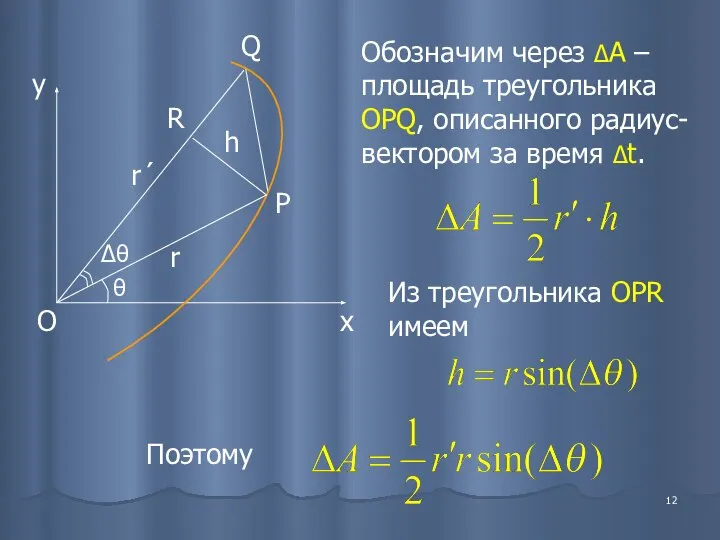
Обозначим через ΔА – площадь треугольника OPQ, описанного радиус-вектором за время
Обозначим через ΔА – площадь треугольника OPQ, описанного радиус-вектором за время
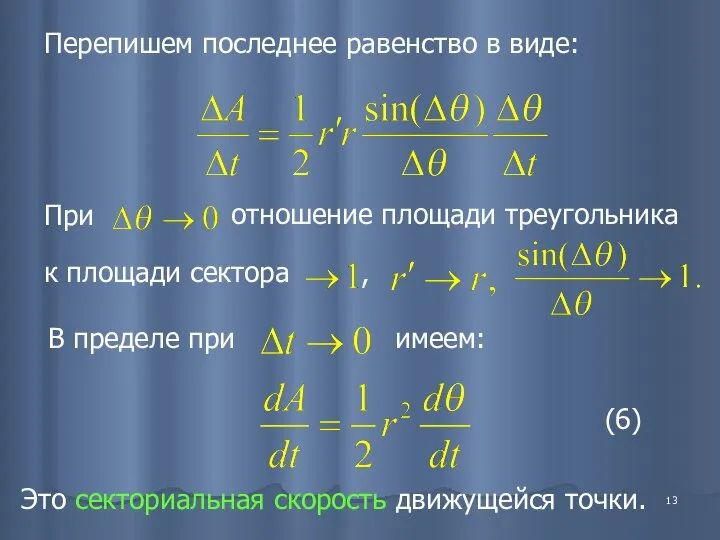
Перепишем последнее равенство в виде:
При
отношение площади треугольника
к площади сектора
,
В пределе при
имеем:
Это
Перепишем последнее равенство в виде:
При
отношение площади треугольника
к площади сектора
,
В пределе при
имеем:
Это
Посмотрим теперь как будет выглядеть последнее выражение в прямоугольных координатах:
Отсюда:
В итоге
Посмотрим теперь как будет выглядеть последнее выражение в прямоугольных координатах:
Отсюда:
В итоге
Постоянные а1, а2, а3 – проекции удвоенной секториальной скорости на плоскости
Постоянные а1, а2, а3 – проекции удвоенной секториальной скорости на плоскости
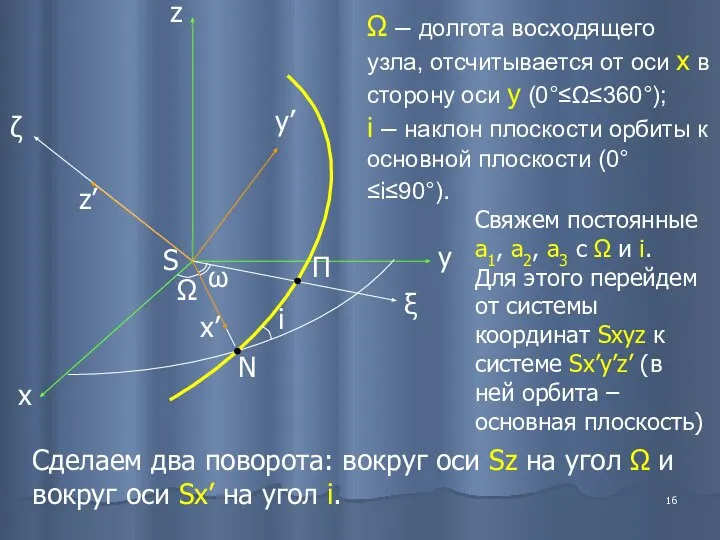
Ω – долгота восходящего узла, отсчитывается от оси x в сторону
Ω – долгота восходящего узла, отсчитывается от оси x в сторону
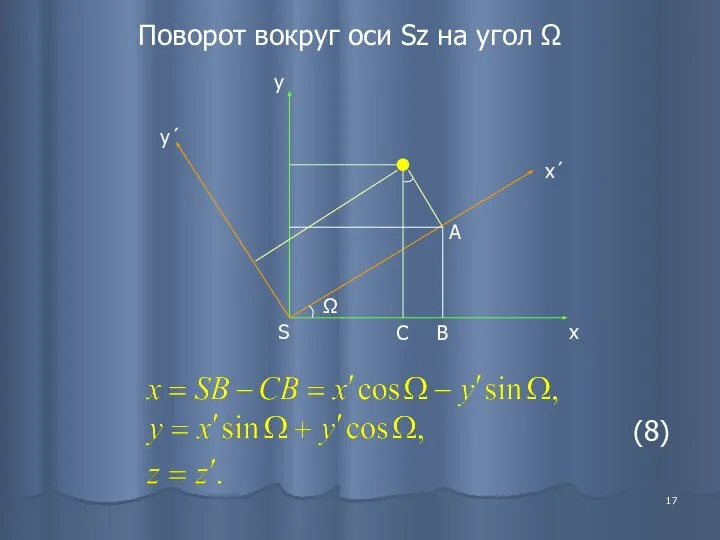
Поворот вокруг оси Sz на угол Ω
(8)
Поворот вокруг оси Sz на угол Ω
(8)
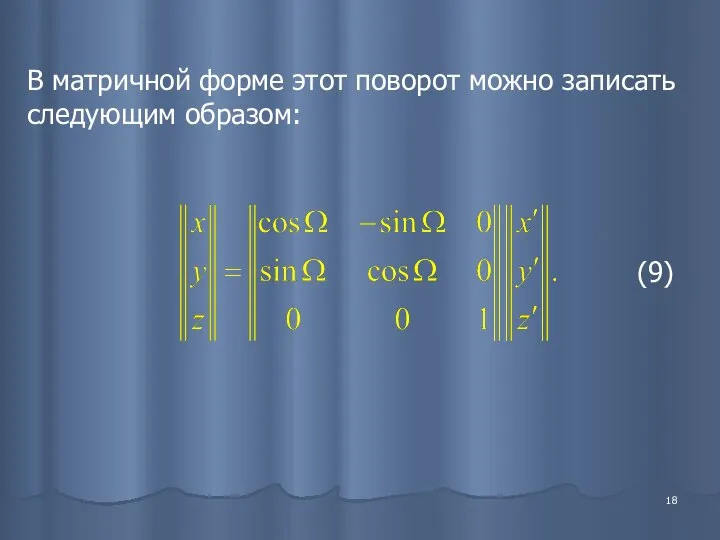
В матричной форме этот поворот можно записать следующим образом:
(9)
В матричной форме этот поворот можно записать следующим образом:
(9)
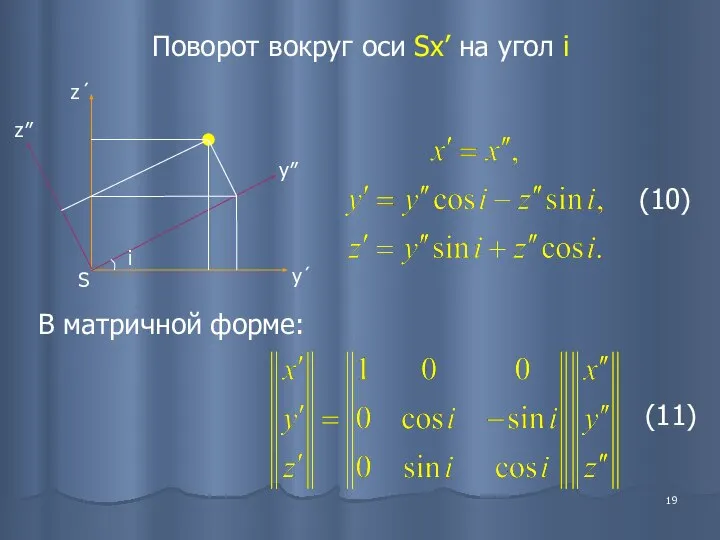
Поворот вокруг оси Sx’ на угол i
В матричной форме:
(10)
(11)
Поворот вокруг оси Sx’ на угол i
В матричной форме:
(10)
(11)
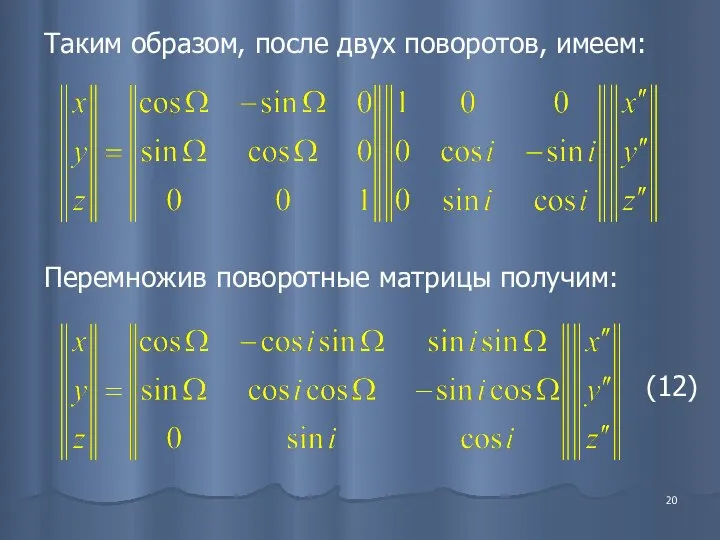
Таким образом, после двух поворотов, имеем:
Перемножив поворотные матрицы получим:
(12)
Таким образом, после двух поворотов, имеем:
Перемножив поворотные матрицы получим:
(12)
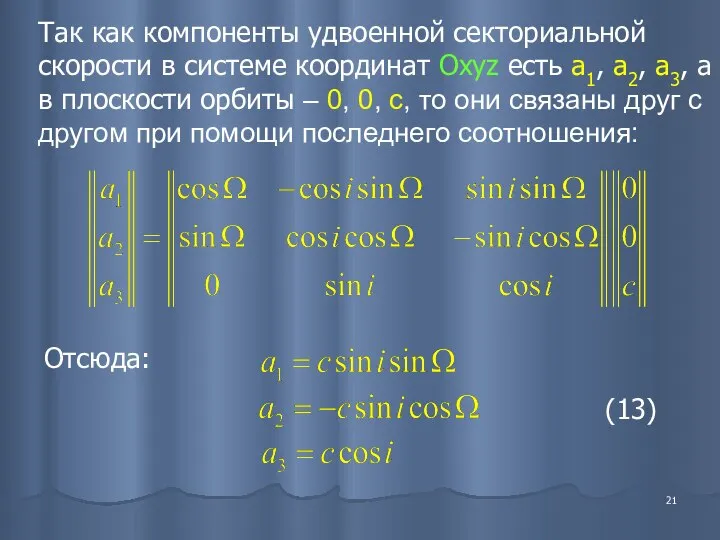
Так как компоненты удвоенной секториальной скорости в системе координат Oxyz есть
Так как компоненты удвоенной секториальной скорости в системе координат Oxyz есть
Перепишем теперь интегралы площадей:
(14)
Осталось связать здесь с элементами орбиты постоянную c.
Перепишем теперь интегралы площадей:
(14)
Осталось связать здесь с элементами орбиты постоянную c.
Умножим первое, второе и третье уравнения системы (3) на
Сложив, получим:
Умножим первое, второе и третье уравнения системы (3) на
Сложив, получим:
можно переписать в виде:
Правую – в виде:
Левую часть равенства
можно переписать в виде:
Правую – в виде:
Левую часть равенства
Таким образом, имеем:
Интегрирование последнего выражения дает нам интеграл энергии:
(15)
Здесь
– постоянная интеграла
Таким образом, имеем:
Интегрирование последнего выражения дает нам интеграл энергии:
(15)
Здесь
– постоянная интеграла
Так как движение происходит в плоскости, то координата z″=0, а радиус-вектор
Интеграл
Так как движение происходит в плоскости, то координата z″=0, а радиус-вектор
Интеграл
Перейдем теперь от прямоугольных координат x″, y″ к полярным координатам r,
Перейдем теперь от прямоугольных координат x″, y″ к полярным координатам r,
Из равенств (16) и (17) имеем
Таким образом
При помощи (16) можно найти
(18)
Из равенств (16) и (17) имеем
Таким образом
При помощи (16) можно найти
(18)
Уравнение (18) можно переписать в виде:
Преобразуем подкоренное выражение:
Обозначим:
Уравнение (18) можно переписать в виде:
Преобразуем подкоренное выражение:
Обозначим:
Имеем:
Далее
Введем замену
Получим:
или
Имеем:
Далее
Введем замену
Получим:
или
Последнее выражение можно проинтегрировать
где ω – постоянная интегрирования.
Отсюда
Но
Поэтому
Последнее выражение можно проинтегрировать
где ω – постоянная интегрирования.
Отсюда
Но
Поэтому
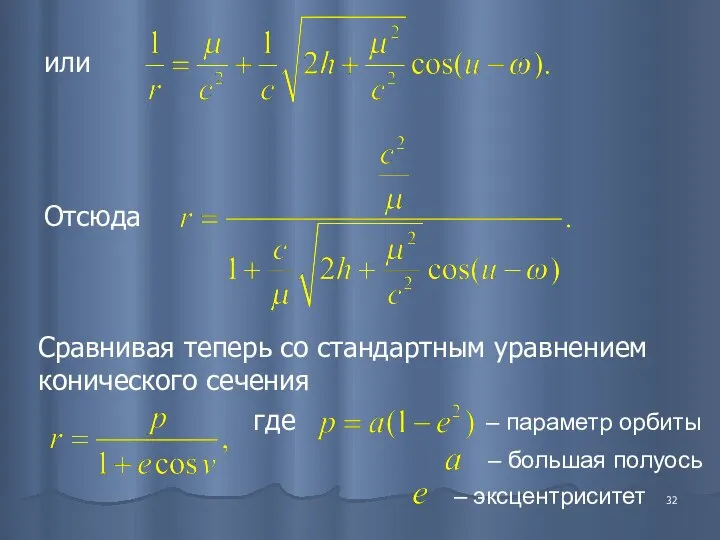
или
Отсюда
Сравнивая теперь со стандартным уравнением конического сечения
где
– параметр орбиты
– большая полуось
–
или
Отсюда
Сравнивая теперь со стандартным уравнением конического сечения
где
– параметр орбиты
– большая полуось
–
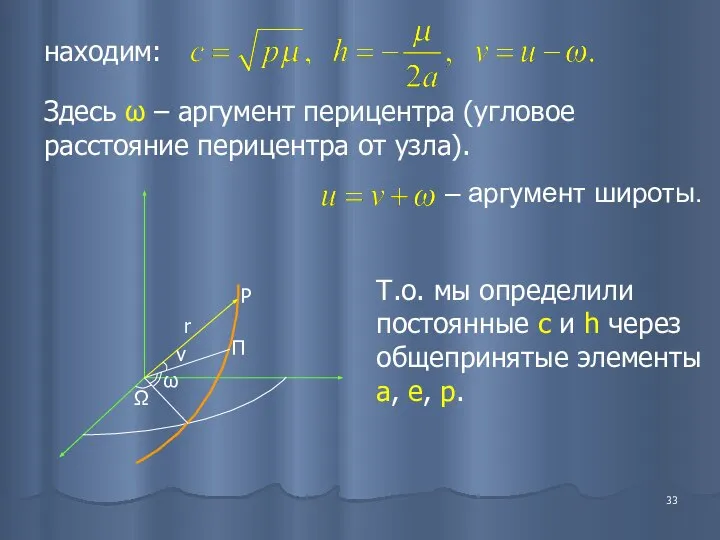
находим:
Здесь ω – аргумент перицентра (угловое расстояние перицентра от узла).
– аргумент
находим:
Здесь ω – аргумент перицентра (угловое расстояние перицентра от узла).
– аргумент
С этими постоянными интеграл энергии
Уравнение траектории
(19)
(20)
(21)
Уравнение интеграла площадей:
С этими постоянными интеграл энергии
Уравнение траектории
(19)
(20)
(21)
Уравнение интеграла площадей:
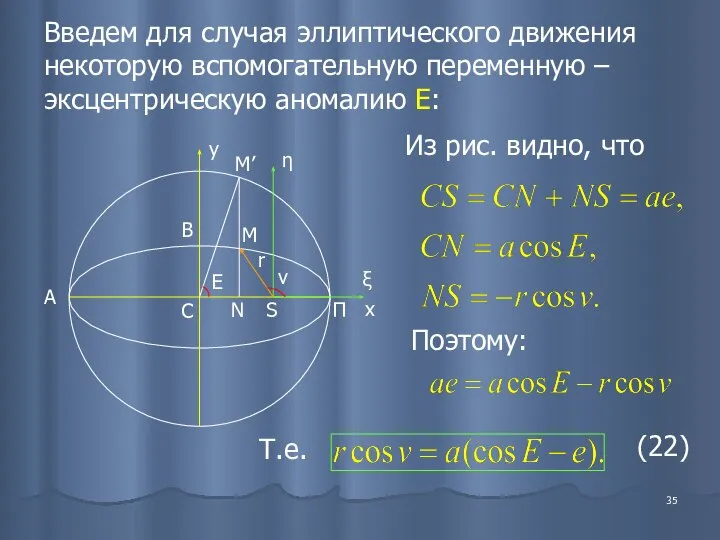
Введем для случая эллиптического движения некоторую вспомогательную переменную – эксцентрическую аномалию
Введем для случая эллиптического движения некоторую вспомогательную переменную – эксцентрическую аномалию
Отношение малой и большой полуоси будет:
Здесь
Отсюда имеем:
(23)
Возводя (22) и (23) в
Отношение малой и большой полуоси будет:
Здесь
Отсюда имеем:
(23)
Возводя (22) и (23) в
x2/a2+y2/b2=1 – уравнение эллипса
x'2/a2+y'2/a2=1 – уравнение окружности
x=x'
y=MN
y‘=M‘N
x2/a2+y2/b2=1 – уравнение эллипса
x'2/a2+y'2/a2=1 – уравнение окружности
x=x'
y=MN
y‘=M‘N
Подставляя (24) в (22) и (23), получим соотношения, связывающие истинную и
Подставляя (24) в (22) и (23), получим соотношения, связывающие истинную и
Делим первое на второе:
Используя тригонометрические соотношения
окончательно находим:
(26)
(25’)
Делим первое на второе:
Используя тригонометрические соотношения
окончательно находим:
(26)
(25’)
Найдем теперь уравнение, связывающее переменную E со временем. Дифференцируя соотношение (26)
Найдем теперь уравнение, связывающее переменную E со временем. Дифференцируя соотношение (26)
Из интеграла площадей (21)
Учитывая, что
Имеем
Из интеграла площадей (21)
Учитывая, что
Имеем
Используя также выражение для радиус-вектора (24)
Откуда имеем
и второе из соотношений (25’)
находим:
Используя также выражение для радиус-вектора (24)
Откуда имеем
и второе из соотношений (25’)
находим:
Интегрируя, находим:
(27)
Здесь
– постоянная интегрирования (момент прохождения через перигелий), а само уравнение
Интегрируя, находим:
(27)
Здесь
– постоянная интегрирования (момент прохождения через перигелий), а само уравнение
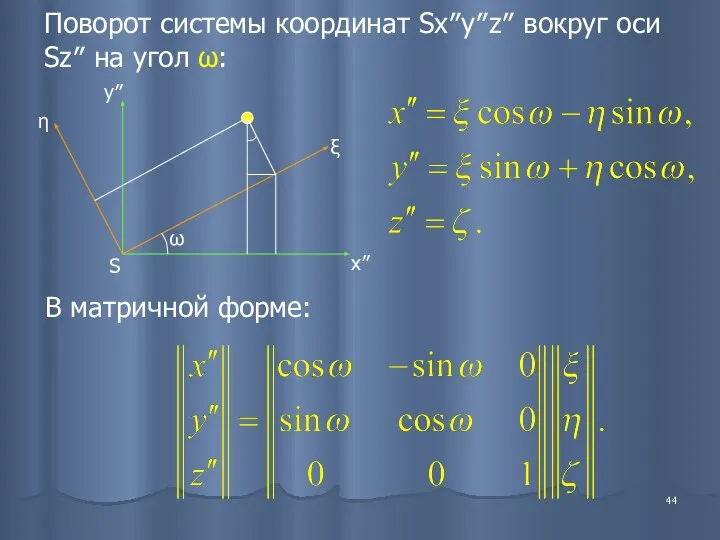
Поворот системы координат Sx″y″z″ вокруг оси Sz″ на угол ω:
В матричной
Поворот системы координат Sx″y″z″ вокруг оси Sz″ на угол ω:
В матричной
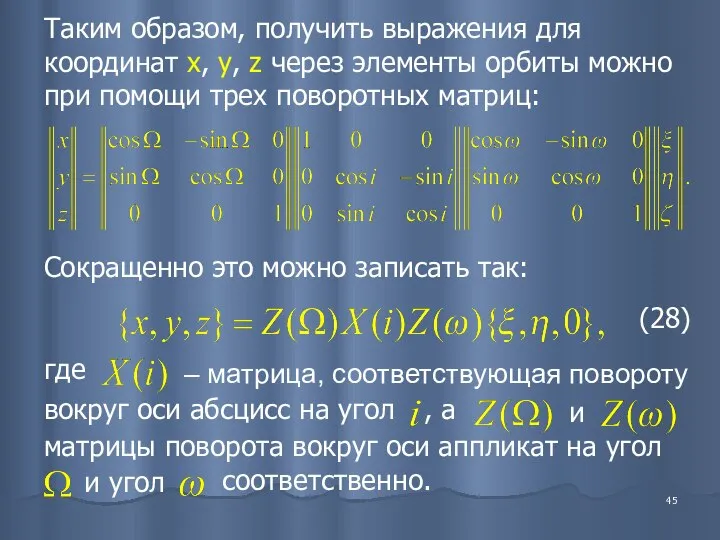
Таким образом, получить выражения для координат x, y, z через элементы
Таким образом, получить выражения для координат x, y, z через элементы
Так как движение в задаче двух тел происходит в плоскости, то
Так как движение в задаче двух тел происходит в плоскости, то
Уравнение Кеплера, связывающее эксцентрическую аномалию и время, обычно записывают в виде:
где
Величина
есть
Уравнение Кеплера, связывающее эксцентрическую аномалию и время, обычно записывают в виде:
где
Величина
есть
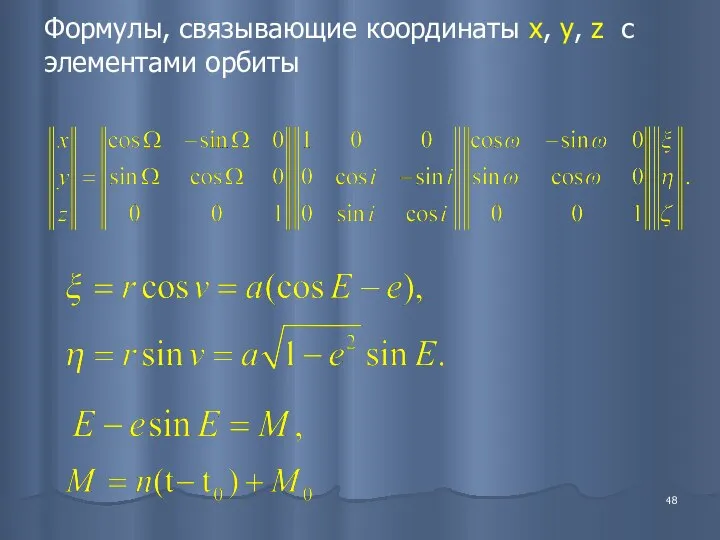
Формулы, связывающие координаты x, y, z с элементами орбиты
Формулы, связывающие координаты x, y, z с элементами орбиты
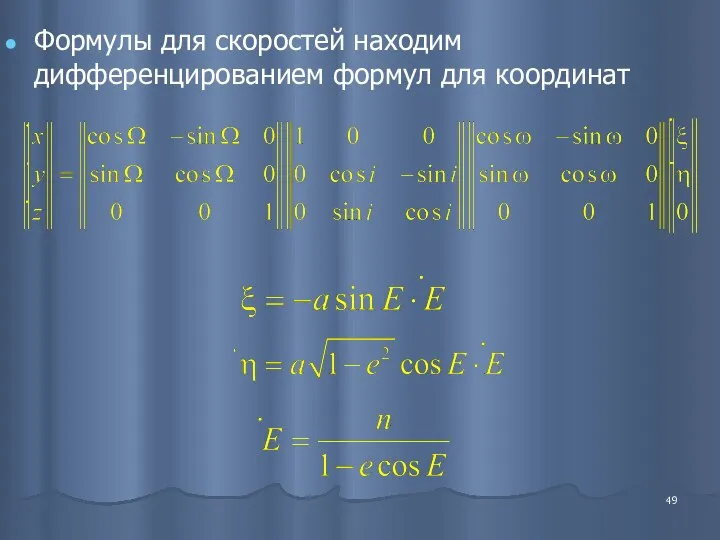
Формулы для скоростей находим дифференцированием формул для координат
Формулы для скоростей находим дифференцированием формул для координат
Формулы для координат и скоростей представляют также в виде
Проективные коэффициенты
Формулы для координат и скоростей представляют также в виде
Проективные коэффициенты
 Командная олимпиада “Высшая проба” 2019. Разбор задач
Командная олимпиада “Высшая проба” 2019. Разбор задач Сложение многочленов Если перед скобками стоит знак «плюс», то… Ответ: члены, стоящие в скобках своих знаков не меняют. Пример: 3х+(2а-5)=3х+2а-5.
Сложение многочленов Если перед скобками стоит знак «плюс», то… Ответ: члены, стоящие в скобках своих знаков не меняют. Пример: 3х+(2а-5)=3х+2а-5. Яковлева Ксения ученица 11 класса МБОУ «СОШ№22» г. Анжеро-Судженск, Кемеровской области Научный руководитель: Лилия Геннадьевна
Яковлева Ксения ученица 11 класса МБОУ «СОШ№22» г. Анжеро-Судженск, Кемеровской области Научный руководитель: Лилия Геннадьевна Решение квадратных уравнений по формуле
Решение квадратных уравнений по формуле Множественная регрессия
Множественная регрессия Сумма нескольких векторов
Сумма нескольких векторов Задача Дидоны Выполнил: Ронжина Мария Игоревна ученица 11 Г кл. МОУ «Лицей» г. Новотроицка. Руководитель: Поветкина Наталия Анатол
Задача Дидоны Выполнил: Ронжина Мария Игоревна ученица 11 Г кл. МОУ «Лицей» г. Новотроицка. Руководитель: Поветкина Наталия Анатол «Своя игра». Математическая викторина 5 класс
«Своя игра». Математическая викторина 5 класс Моделирование систем и процессов. Свойства, классификация математических моделей. Марковские случайные процессы. (Лекция 1)
Моделирование систем и процессов. Свойства, классификация математических моделей. Марковские случайные процессы. (Лекция 1) Математическая викторина 5-6 класс - Презентация по математике_
Математическая викторина 5-6 класс - Презентация по математике_ Деление с остатком
Деление с остатком Деление на двузначное число (4 класс)
Деление на двузначное число (4 класс) Systems of linear algebraic equations
Systems of linear algebraic equations Презентация на тему Методы решения экстремальных задач
Презентация на тему Методы решения экстремальных задач Презентация по математике "Теорема Пифагора" - скачать
Презентация по математике "Теорема Пифагора" - скачать  Задача аппроксимации. Виды интерполяции. Параболическая интерполяция. Единственность интерполяционного многочлена. (Лекция 3)
Задача аппроксимации. Виды интерполяции. Параболическая интерполяция. Единственность интерполяционного многочлена. (Лекция 3) Корень n-й степени из действительного числа (11 класс)
Корень n-й степени из действительного числа (11 класс) Урок 2. Новое из истории развития математики
Урок 2. Новое из истории развития математики Цилиндр. Площадь поверхности цилиндра
Цилиндр. Площадь поверхности цилиндра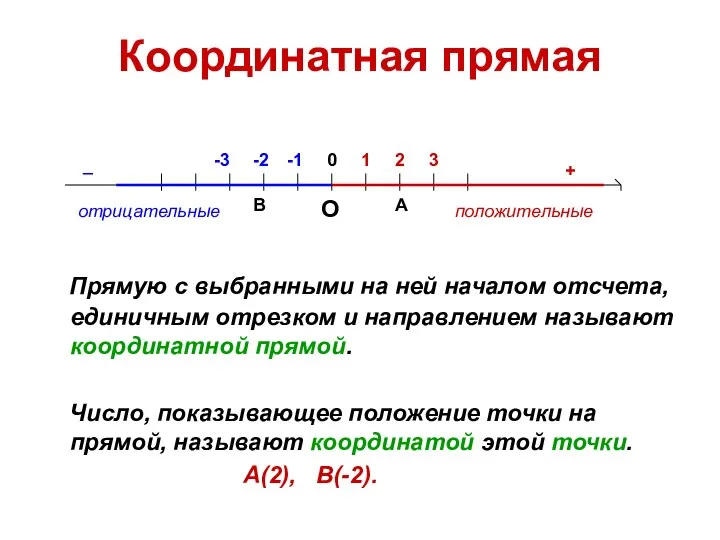 Координатная прямая
Координатная прямая Абсолютная величина вектора в пространстве
Абсолютная величина вектора в пространстве Арифметические действия с дробями
Арифметические действия с дробями Прибавление и вычитание числа 5
Прибавление и вычитание числа 5 Путешествие в сказочную страну. Урок - игра
Путешествие в сказочную страну. Урок - игра Сложение и вычитание десятичных дробей. (Урок 109)
Сложение и вычитание десятичных дробей. (Урок 109) Апроксимація експериментальних даних засобами табличного процесора
Апроксимація експериментальних даних засобами табличного процесора Решение задач с помощью пропорций. 7 класс
Решение задач с помощью пропорций. 7 класс Открытый урок в 1 классе по математике. Тема: Дециметр
Открытый урок в 1 классе по математике. Тема: Дециметр